Download

1 / 15
270 likes | 1.09k Views
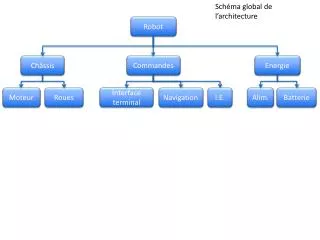
Lhuillier Durand . SI1. Le robot aspirateur. Donner le rôle de l’aspirateur étudié en utilisant l’outil « Bête à Cornes ». 1) Besoin et fonctions techniques :. A. 2) Diagramme pieuvre du robot aspirateur . Energie. Poussières. Local / pièce. Aspirateur Navibot. Utilisateur.

E N D
Lhuillier Durand SI1 Le robot aspirateur
Donner le rôle de l’aspirateur étudié en utilisant l’outil « Bête à Cornes » 1) Besoin et fonctions techniques : A
2) Diagramme pieuvre du robot aspirateur Energie Poussières Local / pièce AspirateurNavibot Utilisateur Obstacle / vide
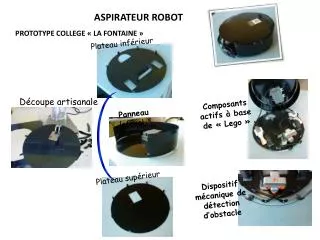
3) Eléments techniques associés à chaque fonction L’énergie utilisée pour mouvoir le robot aspirateur est l’énergie électrique Télécommande Bouton de fonctionnement Capteur VIRTUAL GUARD • Il y a 4 moteurs : • Moteur Brosses latéral • Moteur brosse principal • Roue gauche et droit motoréducteur Capteur de la télécommande Capteur d’obstacles Batterie
1) Etude de marché CIT1 • Les 10 dernières années, le marché de l’aspirateur est en hausse de 5.6 % • En France, en 2011, chaque foyer est équipé en moyenne de 6,9 gros appareils ménagers et de 12 petits appareils.
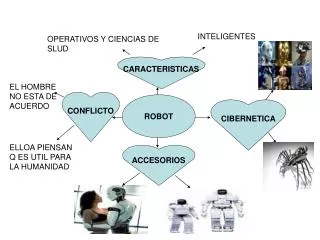
2) Produits concurrents • Les trois robots concurants au Samsung Navibot SR 8855 sont : e.Zicom E.ZICLEAN Revolution Rouge iRobot ROOMBA 780 -LG HOM-BOT VR1229B
les différentes caractéristiques entre le Samsung Navibot SR 8855 et les autres appareils que nous avons choisit sont : • dimensions, l’autonomie, le temps de rechargement, la capacité du bac, le type de guidage, le mode d’utilisation, le système, le poids, le type de batterie, le temps de garantie…
1) Performances annoncées par le constructeur Samsung SI2 • Les performances non annoncées par le constructeur Samsung sont : -Il peut nettoyé une zone délimiter par des capteurs. -le temps de rechargement de l’appareil.
2) Liste des expériences à mener La liste des performances qu’il est possible de vérifier est: Nettoyer une zone délimiter par des capteurs, le temps de rechargement de l’appareil, la hauteur qui peut franchir (exemple: seuil de porte) se déplacer en esquivant les obstacles, le retour automatique a la station, la hauteur de la pante qu’il peut franchir et sa vitesse de déplacement.
3) Franchissement d’obstacles • Durant cette expérience nous allons voir si le Samsung Navibot SR 8855 est capable de franchir un obstacle de 1.5cm de hauteur, pour cela nous allons utiliser une planche de bois de 1cm superposé à une planche de plexiglas de 0.5cm de hauteur. Mais nous allons aussi essayer de mettre plus de hauteur (1.6cm) Après avoir réaliser cette expérience, nous en avons conclut que le Samsung Navibot SR 8855 est capable de passer un obstacle de 1.5cm de hauteur mais pas un obstacle de 1.6cm.
4) Performances de la batterie • Le robot aspirateur est alimenté par une batterie NiMH (« Nickel-Metal Hydride »). • Elle est respectueuse de l’environnement, rechargeable et dotée d’une fonction de prévention de surcharge.
5) Vérification des performances de retour à la station. • Pour cette expérience, nous allons placé le robot aspirateur a l’autre bout de la pièce, pour voir si le robot reviens seul à la station pour se recharger. • Oui le robot reviens bien tout seul a la station. • Lorsque la station ou le robot est déplacé il recherche la station pour pouvoir si rendre et se recharger. station Arrivée Départ
6) Sol en pente • Pour calculer la pente que le robot peut franchir sur différents élément (bois, plexiglas) on dois calculer la hauteur de la pante. • Sur le bois, le robot aspirateur est capable de monter une pente de hauteur 25cm. • Sur le plexiglas, le robot aspirateur est capable de monter une pente de hauteur 21cm.
7) Vérification de la vitesse de déplacement • Vitesse= distance/temps • Distance m = 4.5m 4.5/16= 0.28 (m/sec) • Temps = 16sec • Donc il se déplace à 0.28m/sec ou 280mm/sec. • La vitesse donne par le constructeur est la même que celle que l’on a calculer.