Download
1 / 41
420 likes | 560 Views
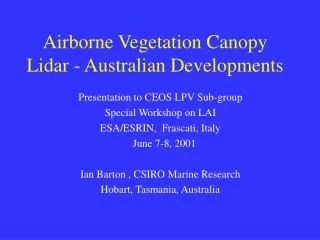
Merging InSAR and LIDAR to Estimate Surface and Vegetation Heights. EECS 826 InSAR and Applications University of Kansas Jeff S. Hall April 2 nd , 2009. Overview.

E N D
Merging InSAR and LIDAR to Estimate Surface and Vegetation Heights EECS 826 InSAR and Applications University of Kansas Jeff S. Hall April 2nd, 2009
Overview • Main reference paper: “Fusing Interferometric Radar and Laser Altimeter Data to Estimate Surface Topography and Vegetation Heights”, K. Clint Slatton, Melba Crawford, Brian Evans, IEEE Transactions on Geoscience and Remote Sensing, Vol 39, No. 11, November 2001 • Utilized overlapping InSAR (NASA/JPL TOPSAR) and LIDAR ALTM (Optech) data to map true topography and vegetation heights in Bolivar Peninsula, TX
Topics • LIDAR ALTM Basics • NASA/JPL AIRSAR/TOPSAR Overview • Problem statement • InSAR issues • LIDAR issues • InSAR data transformation • LIDAR data transformation • Merging results • Conclusion
LIDAR ALTM Basics • LIDAR is Light Detection and Ranging. • ALTM is Airborne Laser Terrain Mapping Optech Gemini System [1] [1]
LIDAR ALTM Basics • LIDAR is similar to pulsed radar, in that it uses pulses of light to find the distance to a target by measuring the time of travel between the emitter and scattered return. • LIDAR has much shorter wavelengths using lasers in near infrared (700 nm-1400 nm, visible (400 nm-700 nm), and ultraviolet spectra (10 nm-400 nm) [1]
LIDAR ALTM Basics • Semiconductor lasers or Nd:YAG lasers pumped by semiconductor lasers • Mostly Nd:YAG = neodymium-doped yttrium aluminium garnet, Nd:Y3Al5O12 • Optech ALTM emits at λ = 1064 nm (near infrared) • Must be careful about eye safety [5]
LIDAR ALTM Basics • Laser rangefinder in aircraft floor • Inertial reference, stabilized laser • GPS receiver, possibly differential GPS [7] [3]
LIDAR ALTM Basics • In post-flight processing, the laser range, scan angle, GPS data and inertial reference data are combined to accurately determine the position of a point on the Earth's surface. [3] [3]
LIDAR ALTM Basics • LIDAR ALTM operates at angles near nadir, not at steep look angles like SAR. • Imaging swaths are narrow, generally less than 1 km wide. • Large area maps are impractical with LIDAR. • Clouds, atmospheric effects obscure LIDAR [3]
LIDAR ALTM Basics • Lasers have much superior beam density and coherency than radio waves. Accuracies of +/- 15 cm are typical for LIDAR compared to 2-5 m at best for TOPSAR radar in nonvegetated areas. • Radar penetrates much of the leaves and vegetation, especially at longer wavelengths (P band ideally), compared to LIDAR which scatters heavily at the interface. C band data was used in report because of short physical baseline, but would be more ideal at longer wavelengths for penetration. [2]
Example LIDAR Image [8] [11] [3]
NASA/JPL AIRSAR/TOPSAR • NASA DC-8 out of NASA Ames. • Flew 1988-2004, superseded by UAVSAR • P-band, L-band, C-band (VV polarization) data • Data utilized was C-band with dual baselines: 2.58 m and 5.16 m (ping-pong mode) [10]
TOPSAR Parameters • Frequency = 5.2675 - 5.3075 GHz (C-band) • Wavelength = 5.65-5.7 cm • Antenna length = 1.36 m • Physical baseline length = 2.583 m (ping-pong mode doubles this baseline) • Baseline tilt angle = 62.77° (assuming level aircraft, adjusted per attitude data) • Aircraft speed = ~220 m/s • Side-looking angle = 45° (nominal) • Nominal altitude = 9 km • Swath width = 4630 m (slant range), 10-15 km ground swath • Slant range = ~12730 m ( at 45° look angle) • Ground range resolution = 5.30 m • Slant range resolution = 3.75 m • Azimuth resolution = 0.8 m (1 look) • Chirp bandwidth = 40 MHz • Pulse length = 5.0 us • Sampling frequency = 90 MHz • SNR (distributed targets) = 13 dB • SNR (point targets) = 18 dB • PRF up to 600 Hz (min PRF for Doppler is 274 Hz—more than twice rate for dual baseline data) [9]
AIRSAR • Example AIRSAR data [5]
TOPSAR • Topographic data from C band TOPSAR [9]
Problem • There is a necessity to map true surface topography • Hydrologic modeling problems require bare-surface topography to model water runoff and nonpoint source water pollution transport in heavily vegetated water areas. • Augmentation of INSAR-derived topographic data with higher resolution and/or newer topographic data that are acquired over regions of interest for such diverse problems as tactical military planning and monitoring localized fault-driven land subsidence. [2]
InSAR Issues • InSAR observations do not provide direct measurements of the true surface topography in vegetated areas, but instead yield a height that depends on the sensor characteristics, the surface elevation, and the vegetation. • Topographic SAR (TOPSAR) acquire data in swaths several kilometers wide, from which data products with vertical height accuracies of 2–5 m can be produced over nonvegetated regions. The presence of vegetation, however, can lead to errors in the computed surface topography on the order of the vegetation height. [2]
LIDAR Issues • LIDAR is limited to small swaths due to laser power, varying from nadir creates more vegetation shadowing where LIDAR can not penetrate to bare surface topography. • Not an all weather operation like InSAR. Atmospheric effects are much more apparent.
Proposed Solution • Transform observations to obtain estimates of ground elevations and vegetation heights • Combine transformed InSAR and LIDAR data to obtain statistically optimal estimates of ground and vegatation heights. [2]
Transforming InSAR and LIDAR • InSAR and LIDAR do not measure the same physical quantities. • Data must be transformed into sets of ground elevation and vegetation estimates. • InSAR data is transformed by inverting scattering model • LIDAR transformation is done from an empirical model [2]
InSAR Model Inversion • InSAR height computations per pixel are generally greater than the elevation of bare ground but less than the elevation of the vegetation canopy. [2]
InSAR Model Inversion • Closed-form inverse of scattering models not possible in general. Numerical methods used. [2]
InSAR Model Inversion • After 2 sets of M(x) scattering models obtained, numerical inversion is done to obtain estimates of zg (ground height), zv (vegetation height), and k (extinction coefficient, density) • Optimization performed per pixel. [2]
Transforming LIDAR Data • LIDAR data from Optech ALTM • Footprint size of 15 cm • Spacing of 1-2 m • Swath width of 600 m • Gridded onto image lattice of LIDAR heights zl. • Grid size of 10 m x 10 m, about 15 pulses per pixel • Standard deviations included in pixel data • Basically, LIDAR (first return) measures vegetation heights everywhere and surface where bare. [2]
Transforming LIDAR Data • In multiple pulse data, some pulses impact foliage, some impact ground. High standard deviation in multiple pulses per pixel height corresponds to vegetation. • Interpolation done to estimate ground and vegetation heights. • Study does not have high relief terrain (it’s Texas) so interpolation does not remove significant features. [2]
Merging InSAR and LIDAR Data • InSAR data was averaged for 20 m x 20 m pixel size. • LIDAR data was mosaiced from 10 overlapping flight lines to cover region from single pass for InSAR, but only ¼ used to simulate sparse data. 10 m x 10 m pixel size.
Merging InSAR and LIDAR Data • Multiscale Kalman Smoothing algorithm developed for use in merging the different sets of data. Kalman filter produces minimum mean squared error for sparse, noisy data. [2]
Results • Data evaluated compared to full set of LIDAR data, where LIDAR is presumed to be correct for vegetation heights. [2]
Results • Results compared before and after MKS for both test sites, Elm Grove and Melody Lane. • Mean squared error decreases 90% for bare surface and 87% for vegetation heights. [2]
Conclusion • Combining physical modeling with multiscale estimation improves bare surface and vegetation heights from InSAR. • Estimates further improved with sparse LIDAR data. • Further research may use higher resolution LIDAR data, noniterative methods for bare surface topography with InSAR. • Additional study areas should be evaluated. [2]
Questions • Any questions?
Image References • [1]http://www.optech.ca/images_terrestrial/altmgemini167.jpg • [2]http://www.optech.ca/images_terrestrial/altm_operation.jpg • [3]http://gsc.nrcan.gc.ca/glaciology/national/activities_e.php • [4]http://southport.jpl.nasa.gov/airsar/airsar.gif • [5]http://southport.jpl.nasa.gov/airsar/topsar/ts0037t.jpg • [6]http://airsar.jpl.nasa.gov/documents/genairsar/airsar_paper1.pdf • [7]http://home.iitk.ac.in/~blohani/LiDAR_Tutorial/Topogr6.jpg • [8] Neuenschwander, Amy, et al, “Extraction of Digital Elevation Models for Airborne Laser Terrain Mapping Data”, Center for Space Research, University of Texas, 2001 • [9]http://southport.jpl.nasa.gov/airsar/topsar/ts0037b.jpg • [10] http://www.corista.unina.it/images/sarant.jpg • [11]http://www.optech.ca/images_terrestrial/shorelines.jpg
References • [1] http://en.wikipedia.org/wiki/LIDAR • [2] Slatton, K. Clint, et al, “Fusing Interferometric Radar and Laser Altimeter Data to Estimate Surface Topography and Vegetation Heights”, IEEE Transactions on Geoscience and Remote Sensing, Vol 39, No. 11, November 2001 • [3] Optech Incorporated web site, www.optech.ca • [4]http://home.iitk.ac.in/~blohani/LiDAR_Tutorial/Airborne_AltimetricLidar_Tutorial.htm • [5]http://www.ikg.uni-hannover.de/fileadmin/ikg/staff/publications/sonstige_Beitraege/Brenner_tutorialSommerSchool2006.pdf • [6]http://airsar.jpl.nasa.gov/documents/genairsar/airsar_paper1.pdf • [7]http://airsar.jpl.nasa.gov/documents/genairsar/chapter3.pdf • [8]http://home.iitk.ac.in/~blohani/LiDAR_Tutorial/Airborne_AltimetricLidar_Tutorial.htm • [9] http://www.corista.unina.it/topsare.html