Download
1 / 12
200 likes | 1.1k Views
Synchronous reluctance motor. Student: Chih -Hung Wang Teacher: Ming- Shyan Wang. Fundamental Introduction Vector Diagram Control Strategy Control Strategy Compare Reference. Outline. Fundamental. 假設有一異向性磁性材料 a 在一個單一方向的磁場中,其 d 軸與 q 軸有著不一樣的磁阻,磁場中的磁力線會趨向於較好通過的 d 軸。

E N D
Synchronous reluctance motor Student: Chih-Hung Wang Teacher: Ming-Shyan Wang
Fundamental Introduction Vector Diagram Control Strategy Control Strategy Compare Reference Outline Robot and Servo Drive Lab.
Fundamental • 假設有一異向性磁性材料a在一個單一方向的磁場中,其d軸與q軸有著不一樣的磁阻,磁場中的磁力線會趨向於較好通過的d軸。 • 當d軸與磁場的方向傾斜了角度δ, 磁力線被扭曲後,d軸會傾向於δ->0 將磁力線拉直的方向的方向前進。 Robot and Servo Drive Lab.
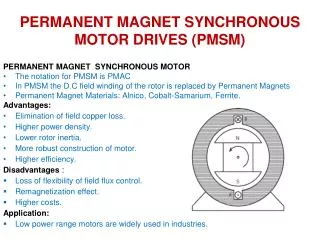
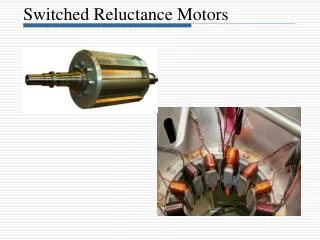
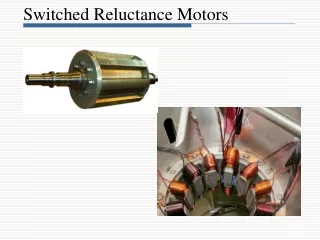
Introduction • 同步磁阻馬達(SynRM)分為2種,一種是同步磁阻馬達(SynRM),另一種是切換式磁阻馬達(SRM)。 • 與一般凸極式同步電動機一樣,差別在轉子沒有永久磁鐵,完全靠DQ軸磁阻差來產生轉矩,因此缺少激磁轉矩。 Robot and Servo Drive Lab.
Vector diagram 轉矩公式: Robot and Servo Drive Lab.
恆角控制:constant angle control(CAC) 最大轉矩控制:maximum torque control(MTC) 最大功因控制 :maximum power factor control(MPFC) 最大轉矩變化率控制:maximum rate of change of torque control (MRCTC) 感應軸電流恆定控制:constant current in inductive axis current control(CCIAC) Control Strategy Robot and Servo Drive Lab.
constant current in inductive axis current control(CCIAC) Torque Control Robot and Servo Drive Lab.
Compare Robot and Servo Drive Lab.
Reference • 同步磁阻馬達之性能分析及運動控制研究-賴秋庚教授 • 向量控制-劉昌煥老師 • 電機機械-陳文耀老師 Robot and Servo Drive Lab.
Thank you for listening Robot and Servo Drive Lab.