Download
1 / 19
310 likes | 903 Views
Fuzzy Logic Controller for the Inverted Pendulum Problem . Project:. by Larry Bush. Why?. Simulator. Simulator:. Problem Statement. Re-statement . To improve the model. Consequent MFs:. cp = fn ( 17, [ -5.4 : +5.4 ] ) Evenly Spaced Horizontally Symmetrical Orthogonal Trapezoidal

E N D
Fuzzy Logic Controllerfor the Inverted Pendulum Problem . Project: by Larry Bush
Simulator Simulator:
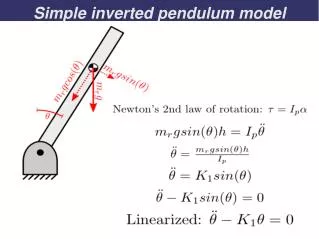
Re-statement • To improve the model.
Consequent MFs: • cp = fn ( 17, [ -5.4 : +5.4 ] ) • Evenly Spaced • Horizontally Symmetrical • Orthogonal • Trapezoidal • Support = 3 x Core
Rule-Base cmf(i, j, k, l) = cp(i + j + k + l - 3) for i, j, k, l = [ 1 : 5 ]
Rule-Base cmf(i, j, k, l) = cp( i + (j-1) + (-k+5) + (-l+5) )
Rule-Base cmf( 1, 1, 1, 1 ) = cp( i + (j-1) + (-k+5) + (-l+5) ) = cp( 9 ) ~ Force = 0
Rule-Base Angle is large positive. Angular Velocity is large positive. Cart Position is large negative. Cart Velocity is large negative. cmf( 5, 5, 1, 1 ) = cp( i + (j-1) + (-k+5) + (-l+5) ) = cp( 17 ) ~ Force = large positive
Rule-Base Angle is small positive. Angular Velocity is small positive. Cart Position is zero. Cart Velocity is zero. cmf( 4, 4, 3, 3 ) = cp( i + (j-1) + (-k+5) + (-l+5) ) = cp( 11 ) ~ Force = small positive
Take Aways • Fuzzy Controllers Work • 4-input, 5-MF • Work the Best • Computationally Expensive • Difficult to Tune • Automated Tuning Techniques Work