Download
1 / 28
330 likes | 585 Views
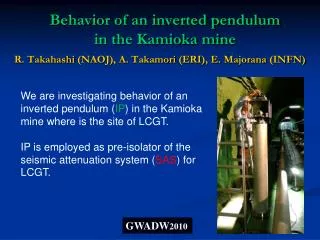
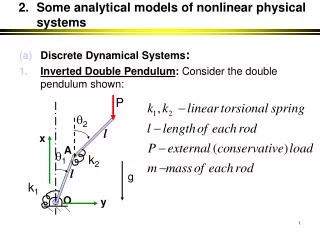
The Inverted Pendulum. 1. Arthur Ewenczyk Leon Furchtgott Will Steinhardt Philip Stern Avi Ziskind PHY 210 Princeton University. m. l. θ. A, ω. Formulating the problem. Pendulum Mass ( m ) Length ( l ) Oscillating Pivot Amplitude ( A ) Frequency ( ω). m. l. θ. A, ω.

E N D
The Inverted Pendulum 1 Arthur Ewenczyk Leon Furchtgott Will Steinhardt Philip Stern Avi Ziskind PHY 210 Princeton University
m l θ A, ω Formulating the problem • Pendulum • Mass (m) • Length (l) • Oscillating Pivot • Amplitude (A) • Frequency (ω)
m l θ A, ω Formulating the problem Forces Acting on the Pendulum • Gravity • Force of the pivot • [Friction]
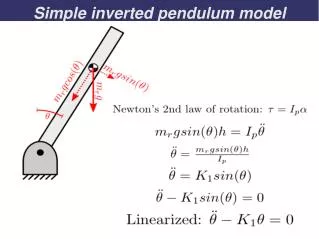
m l θ A, ω Equation of Motion • Newton’s Second Law • Linear motion: • Circular motion: • Equation of Motion
m l θ Torques • Gravity: • Oscillating pivot: • Force: • Torque:
m θ θ m Equation of Motion Gravity term Pivotterm For example:
Physical Intuition Pivot term (dominates for large values of ω) Inertial (lab)frame Non-inertialframe (of pendulum) Butikov, Eugene. On the dynamic stabilization of an inverted pendulum. Am. J. Phys., Vol. 69, No. 7, July 2001
For small values of θ: Reparameterization Reparameterize: Let: Mathieu's Equation
Stability stable stable Regular Pendulum: Inverted Pendulum: unstable unstable Smith, Blackburn, et. al.Stability and Hopf bifurcations in an inverted pendulum. Am J. Phys. 60 (10), Oct 1992 Matlab Plot
(fixed) (depends on ω) Physical Region Our values of ε and δ Stability condition: (approximating A << l) ε = 0.067
How We Built It Some of the things we originally used to stabilize the pendulum
Data Speed 1 (8 Hz) Speed 2 (13 Hz) Speed 3 (23 Hz) Speed ~2.8 (22 Hz) 25
DATA AQUISITION 1415 RPM = 23.58 Hz
Problems we had Finding right amplitude and frequency Finding right equipment Stabilizing apparatus Getting apparatus to right frequency Soldering 27
Thank You • Professor Page • Wei Chen • PHY 210 Colleagues • Sam Cohen • Mike Peloso