Download
1 / 83
840 likes | 1.43k Views
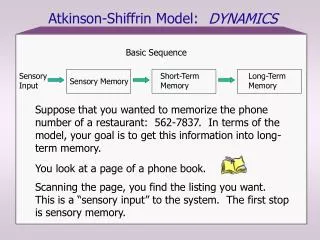
Dynamics 61211. Objectives: Developing student abilities in understanding and solving dynamic problems related to particles, rigid bodies and vibrations. Course content. Kinematics of a particle: chapter 12 ( all sections except 12.8)

E N D
Dynamics 61211 Objectives: Developing student abilities in understanding and solving dynamic problems related to particles, rigid bodies and vibrations.
Course content Kinematics of a particle: chapter 12 ( all sections except 12.8) Planar kinematics of a rigid body: chapter 16 (all sections except 16.4, 16.6 and 16.8) Planar kinetics of a rigid body: Force and acceleration: Chapter 17 Planar Kinetics of a rigid body: Work and energy: Chapter 18 Vibrations: Chapter 22 (all sections except 22.2) Planar kinetics of a rigid body: Impulse and momentum: chapter 19 (19.1, 19.2 and 19.3)
Text book Engineering Mechanics: Dynamics, by Hibbeler, 2007, 11th edition in SI Units Grading and evaluation: Quizzes 5% First hour exam 25% Second hour exam 25% Final exam 50%
Dynamics 61211 Statics: Equilibrium of bodies at rest or with constant velocity Dynamics: Equilibrium of bodies moving with acceleration
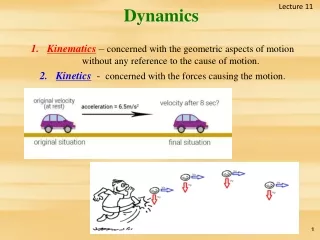
Dynamics Kinematics: Treats geometric aspects of the motion Kinetics Analysis of the forces causing the motion
Problem solving 1- Read and correlate physical situation with theory studied 2- Draw necessary diagrams and tabulate data 3- Establish a coordinate system and apply the relevant principles in a mathematical form 4- Solve the necessary equations algebraically as far as practical 5- Study the answer using technical judgment and common sense to determine whether or not it seems reasonable 6- Review problem, try to think
RECTILINEAR KINEMATICS Objectives: -find the kinematic quantities of a particle traveling along a straight path.
APPLICATIONS The motion of large objects, such as rockets …, can often be analyzed as if they were particles. Why?
POSITION AND DISPLACEMENT Define rectilinear motion The position relative to the origin, O, is defined by r, or s, units? The displacement is change in position. Vector : r = r’ - r Scalar : s = s’ - s The totaldistance, sT, is …
VELOCITY Velocity is... It is a vector quantity, its magnitude is called speed, units m/s The average velocity is vavg = r/t The instantaneous velocity is v = dr/dt Speed is … v = ds/dt Average speed is (vsp)avg = sT/ t
ACCELERATION Acceleration is …, its units are … Vector form: a = dv/dt Scalar form: a = dv/dt = d2s/dt2 We can also express: a ds = v dv
Position: Velocity: v t v s s t ò ò ò ò ò ò = = = dv a dt or v dv a ds ds v dt v o v s s o o o o o Thus • Differentiate position to get velocity and acceleration. v = ds/dt ; a = dv/dt or a = v dv/ds •Integrate acceleration for velocity and position. • so and vo are the initial position and velocity at t = 0.
v t ò ò = = + dv a dt v v a t yields c o c v o o s t ò ò = = + + ds v dt s s v t (1/2)a t yields o o c 2 s o o v s ò ò = = + v dv a ds v (v ) 2a (s - s ) yields 2 2 c o c o v s o o CONSTANTACCELERATION (particular case) Constant acceleration(e.g. gravity ac =g= -9.81 m/s2 ), then
ERRATIC MOTION Objectives: Determine position, velocity, and acceleration using graphs.
APPLICATION Having a v-s graph, can we determine a at s = 300m? How?
GRAPHING -Better to handle complex motions difficult to describe with formulas. -Graphs provide a visual description of motion. -Graphs are true meaning of dynamics
S-T GRAPH V-t: Find slope of s-t (v = ds/dt) at various points.
V-T GRAPH a-t: Find slope of v-t (a = dv/dt) at various points.
A-T GRAPH v-t is the area under the a-t curve. We need initial velocity of the particle.
s2 ½ (v1² – vo²) = ò a ds s1 A-S GRAPH Area under a-s curve= change in velocity (recall ∫a ds = ∫ v dv ). We need initial velocity
V-S GRAPH Knowing velocity v and the slope (dv/ds) at a point, acceleration is. a = v (dv/ds)
CURVILINEAR MOTION: RECTANGULAR COMPONENTS Objectives: a) Describe the motion of a particle traveling along a curved path. b) Relate kinematic quantities in terms of the rectangular components of the vectors.
APPLICATIONS Motion of a plane can be tracked with radar relative to a point recorded as a function of time. How to determine v and a? A car travels down a fixed, helical path at a constant speed. How to determine v and a? To design the track, is it important to predict a?
POSITIONAND DISPLACEMENT Define a curvilinear motion? A particle moves along a curve defined by the path function, s. The position is designated by r = r(t). the displacement is Δr = r’ - r
VELOCITY Average velocity is: vavg = Δr/ Δt . Instantaneous velocity is: v = dr/dt . v is always tangent to the path What is speed v? Δ s → Δr as t→0, then v = ds/dt.
ACCELERATION Average acceleration is: aavg = Dv/Dt = (v’- v)/Dt Instantaneous acceleration is: a = dv/dt = d2r/dt2 A hodograph is a plot of the locus of points defining the arrowhead of velocity vectors. Acceleration is tangent to the hodograph. Is it tangent to the path function?
RECTANGULAR COMPONENTS: POSITION The position can be defined as r = x i + y j + z k where x = x(t), y = y(t), and z = z(t) . Magnitude is: r = (x2 + y2 + z2)0.5 Direction is defined by the unit vector: ur = (1/r)r
Velocity vector is : v = dr/dt = d(xi)/dt + d(yj)/dt + d(zk)/dt Since i, j, k are constants then? RECTANGULAR COMPONENTS: VELOCITY Magnitude is v = [(vx)2 + (vy)2 + (vz)2]0.5 Direction is tangent to the path.
Acceleration vector is: a = dv/dt = d2r/dt2 = axi + ayj + azk where ax = = = dvx /dt, ay = = = dvy /dt, az = = = dvz /dt • • •• •• vx vy x y • •• vz z RECTANG. COMPONENTS: ACCELERATION Magnitude is a = [(ax)2 + (ay)2 + (az)2 ]0.5 What about direction of a?
MOTION OF A PROJECTILE (Section 12.6) Objectives: Analyze the free-flight motion of a projectile.
APPLICATIONS At what θ and vo, the ball must be kicked to make a field goal? And to get the maximum distance? What is the maximum h a fireman can project water to, and at what θ ?
Consider two balls: the red falls from rest, the yellow is given a horizontal velocity. Each picture is taken after the same time interval. Why both balls remain at the same elevation at any instant? What about the horizontal distance between successive photos of the yellow ball? Explain! CONCEPT OF PROJECTILE MOTION Projectile motion is a two rectilinear motions: horizontal with zero acceleration and vertical with gravity acceleration.
KINEMATIC EQUATIONS: HORIZONTAL MOTION Since ax = 0, vox remains constant and the position in the x direction can be determined by: x = xo + (vox)(t)
KINEMATIC EQUATIONS: VERTICAL MOTION Since the positive y-axis is directed upward, ay = -g. Application of the constant acceleration equations yields: vy = voy – g(t) y = yo + (voy)(t) – ½g(t)2 vy2 = voy2 – 2g(y – yo) For any given problem, only two of these three equations can be used. Why?
CURVILINEAR MOTION: NORMAL AND TANGENTIAL COMPONENTS (Section 12.7) Objectives: Determine the normal and tangential components of velocity and acceleration of a particle traveling along a curved path.
APPLICATIONS Cars experience an acceleration due to change in velocity (magnitude and\or direction) Why would you care about the total acceleration of the car? If the motorcycle starts from rest and increases its speed at a constant rate, how can we determine its velocity and acceleration at the top of the hill?
NORMAL AND TANGENTIAL COMPONENTS Normal (n) and tangential (t) coordinates are used when a particle moves along a curved path and the path of motion is known The origin is located ontheparticle t-axis is tangent to path and +ve in direction of motion, n-axis is perpendicular to the t-axis and +ve toward the center of curvature of the curve.
NORMAL AND TANGENTIAL COMPONENTS (continued) n and t directions are defined by the unit vectors un and ut, respectively. Radius of curvature, ρ, is the perpendicular distance from the curve to the center of curvature at that point. The position is the distance, s, along the curve from a fixed reference point.
The magnitude is determined by taking the time derivative of the path function, s(t). v = vut where v = s = ds/dt . VELOCITY IN THE n-t COORDINATE SYSTEM The velocity vector is always tangent to the path of motion (t-direction).
Acceleration is a = dv/dt = d(vut)/dt = vut + vut . . . Here v represents the change in the magnitude of velocity and ut change in the direction of ut. . The acceleration vector can be expressed as: . a = vut + (v2/r)un = atut + anun. ACCELERATION IN THE n-t COORDINATE SYSTEM
• The tangential component is tangent to the curve and in the direction of increasing or decreasing velocity. at = v or at ds = v dv . ACCELERATION IN THE n-t COORDINATE SYSTEM (continued) The acceleration vector is a = at ut + an un • The normal or centripetal component is always directed toward the center of curvature of the curve. an = v2/r