Download
1 / 7
70 likes | 259 Views
PID Tuning Classical Methods ChE 466 – Team Boron Alexander Voice, Boron Delta Andrew Wilkins, Boron Delta October 18, 2007. PID Control. Purpose – Provide a constant system output at a specified set point Analyze offset from set point – “error” Instantaneous offset (proportional)

E N D
PID Tuning Classical Methods ChE 466 – Team Boron Alexander Voice, Boron Delta Andrew Wilkins, Boron Delta October 18, 2007
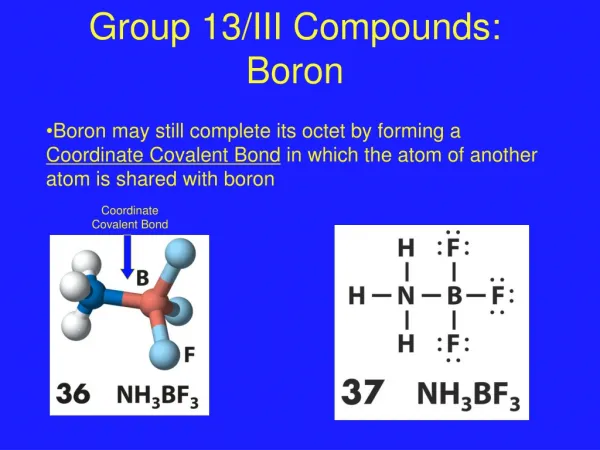
PID Control • Purpose – Provide a constant system output at a specified set point • Analyze offset from set point – “error” • Instantaneous offset (proportional) • Permanent offset (integral) • Change in offset (derivative) • Objective – determine proportional, integral, and derivative scaling coefficients in the control equation
General Control Equation u(t) = Kc [e(t) + (1/Ti) ∫ e(t)dt + Td(de(t)/dt] • u(t) is the controller output • e(t) is error from the system set point • Kc is the controller “gain” • Ti and Td scale the integral in derivative parameters
Tuning MethodsZiegler-Nichols and Tyreus-Luyben • Experimentally determine ultimate gain Ku and Pu • Start with a low value of Kc • Increase Kc until sustained oscillation is observed in the system output • Ku is the smallest value of Kc which achieves oscillation • Pu is the period of oscillation at Ku • Correlation tables are used to determine Kc, Ti, and Td from Ku and Pu
Tuning MethodsCohen-Coon • Generate a step impulse in a system input • Track the system response as a function of time • Determine… • the original steady state output (A) • the new steady state output (B) • the time at which output = .5*B • the time at which output = .632*B • May require curve fitting or interpolation! Voltage Time
Tuning MethodsCohen-Coon t3 t2 B .632*B .5*B
Conclusions Z-N, T-L, and C-C all provide good initial guesses Z-N and T-L require more experimentation Cohen-Coon requires more computation Custom tuning should be used to optimize the control scheme and verify robustness