Download
1 / 61
620 likes | 642 Views
Delve into the complex mechanics and perception of touch, exploring how mechanoreceptors in the skin provide vital tactile information to the brain, guiding skilled movements and object recognition. Learn about different types of touch receptors and their roles in tactile acuity, with insights into nerve branch patterns and receptive fields determining spatial properties.

E N D
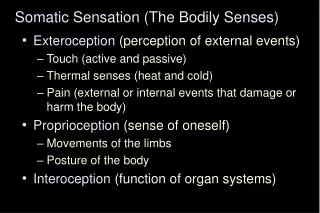
Somatic Sensation (The Bodily Senses) • Exteroception (perception of external events) • Touch (active and passive) • Thermal senses (heat and cold) • Pain (external or internal events that damage or harm the body) • Proprioception (sense of oneself) • Movements of the limbs • Posture of the body • Interoception (function of organ systems)
Dorsal root ganglion neurons mediate somatic sensation • Detect mechanical, thermal or chemical signals • Transduce stimulus energy into electrical signals • Encode depolarization as a spike train • Transmit encoded information to spinal cord or brainstem
Common properties of DRG neurons • Sensory transduction occurs in the nerve endings, not in the DRG or trigeminal cell bodies • Sensory modality determined by the receptor class expressed in the nerve terminals • Distal axons of DRGs form the peripheral nerves • Each peripheral nerve innervates a specific body region
Common properties of DRG neurons • Damage to a peripheral nerve produces deficits in more than one sensory modality in a specific body region • Proximal branch of DRG neuron transmits somatosensory information to the spinal cord and brainstem from specific body region
Dorsal root ganglion neurons differ in: • Receptor morphology and sensitivity • Diverse sensations mediated • Body region innervated • Axon conduction velocity and fiber diameter • Analysis of type(s) of sensory deficits and localization to specific body region(s) are important diagnostic tools • Spinal and brainstem termination sites • Ascending pathways to higher brain centers • Sensitivity to neurotrophins during development
The Sense of Touch Jusepe de Ribera c. 1615-16 Norton Simon Museum Pasadena CA
The sense of touch • Touch is the special sense by which contact with the body is perceived in the conscious mind • Touch allows us to recognize objects held in the hand and use them as tools • Touch enables the blind to perceive the three dimensional form of objects, and to read Braille with their fingers • Tactile information guides the skilled movements of the surgeon, the sculptor, the musician, the pitcher, or the chef
Mechanoreceptors mediate the sense of touch • Mechanoreceptors in the skin provide information to the brain about the size, shape, weight, and texture of objects • They allow us to perceive whether objects appear hard or soft, large or small, heavy or light in weight, smooth or rough in texture • Tactile acuity is highest on the glabrous skin of the hand • The hand contains ~150,000 mechanoreceptors innervated by ~25,000 myelinated nerve fibers traveling in the median, ulnar and superficial radial nerves
Mechanoreceptors detect tissue deformation (A) Lipid tension (B) Structural protein linkage (direct gating) (C) Indirect structural link to TRP receptor
Four types of mechanoreceptors in glabrous skin Meissner’s corpuscles (RA1) Merkel cells (SA1) Ruffini endings (SA2) Pacinian corpuscles (RA2)
Distinct innervation patterns for touch receptors • Receptors in the superficial layers (Meissner’s corpuscles or Merkel cells ) are smaller than those in the deep layers (Pacinian corpuscles and Ruffini endings) • Individual RA1 and SA1 fibers innervate multiple Meissner’s corpuscles or Merkel cells (divergence) • Individual Meissner’s corpuscles are innervated by 2-5 RA1 axons (convergence) • Merkel cells within a ridge are innervated by several SA1 axons • Pacinian corpuscles and Ruffini endings are innervated by single axons (RA2 and SA2 fibers)
Receptive fields determine spatial properties • The receptive field of a sensory neuron defines the spatial location where it responds to stimuli of the appropriate energy • Neurons represent particular sensory spaces • Spatial position of a receptor within the sense organ localizes the stimulus in space • Where we are touched is coded by which specific fibers are activated • Receptive fields within a modality differ in size depending upon function
Receptive and perceptive fields coincide B, C = SA1 fiber Pressure A = RA1 fiber Tap or vibration
Receptor Density in Skin • Fingertip • RA = 141 /cm2 SA I = 70 /cm2 • PC = 21 /cm2 SA II = 9 /cm2 • Palm • RA = 25 /cm2 SA I = 8 /cm2 • PC = 9 /cm2 SA II =16 /cm2
Two-Point Discrimination Threshold • Reflects receptive field (RF) diameters of Meissner’s corpuscle (RA) and Merkel cell (SA I) afferents • RF diameter correlates inversely with innervation density • Spatial acuity highest on densely innervated body regions (fingertips, lips, toes) • Central body map reflects innervation density
Spatial Resolution … and Receptive Fields 20 x 20 pixel 60 x 60 pixel 400 x 400 pixel
Why have multiple touch receptors? • Different receptive field areas encode both fine and broad spatial information • Specialize for dynamic and static sensitivity • Motion sensors • Pressure sensors • Different sensory thresholds extend range of intensities encoded
SA1 fibers respond to probe curvature 2.9 mm probe 7.8 mm probe Goodwin and Wheat, 2004
Slowly-Adapting Receptor Function • Merkel cell (SA I): • Pressure • Precision grip force • Small object shape discrimination • Braille reading and texture discrimination • Ruffini ending (SA II): • Whole hand grip • Hand posture and skin stretch • Large object shape discrimination
RA1 and RA2 fibers detect low and high frequencies RA1 40 Hz RA2 200 Hz
Tuning curves quantify vibratory threshold RA1 fibers
Rapidly-Adapting Receptor Function • Meissner’s corpuscle (RA): • Motion • Texture • Edges • Flutter (low-frequency vibration) • Pacinian corpuscle (PC): • Vibration (tool use) • Contact and release