Download
1 / 46
480 likes | 658 Views
Scheduling in Anti-windup Controllers: State and Output Feedback Cases. Faryar Jabbari Mechanical an Aerospace Engineering Department University of California, Irvine (UCI) November 13, 2007. Thanks. Responsible Party: Solmaz Sajjadi-Kia Collaborators Thanh Nguyen Sharad Sirivastada

E N D
Scheduling in Anti-windup Controllers: State and Output Feedback Cases Faryar Jabbari Mechanical an Aerospace Engineering Department University of California, Irvine (UCI) November 13, 2007
Thanks • Responsible Party: • Solmaz Sajjadi-Kia • Collaborators • Thanh Nguyen • Sharad Sirivastada • Emre Kose • Support • NSF Grants • US D. of Ed GAANN Grants
Surveys • IJRNC: Michele and Bernstein, eds. (1995) • IJRNC: Saberi and Stoorvogel, eds. (1999) • Franco Blanchini's review article(TAC, 2000) • Tarbouriech, et al., Springer, (1999) • Kapila and Grigoriadis, Marcel Dekker (2003) • IJRNC: Saberi and Stoorvogel, eds. (2004) • Much more!
Motivation • Old Problem: actuator limitation is ubiquitous • `Safe' (Low gain) LTI controllers are often excessively conservative • Broad approaches: • Oldest: Anti-windup • Nominal high performance controller (linear design) • Anti-windup augmentation • Relatively new: Explicit account of saturation nonlinearity • Nonlinear design or low gain designs
Direct Approach Considers the controllers limitation at the very beginning of the design Anti-windup Augmentation on top of the nominal controller designed without considering controller bound Current Techniques to Deal with Saturation ||W||2<W2max
Anti-windup • Starting in 60's (Sandberg, among many) • Huge body or work, at times intuitive or even ad-hoc • Many attempts at unifying, interpreting of all techniques • New rigorous stability and performance results • Morari group • Teel group • Many others (literally too numerous to review!) • Positivity, small gain, LMI's, etc.
Anti windup (continued) • High performance when no saturation • Ideal for `occasional' saturation • Relatively weak performance when in saturation • Typically open loop performance -- so open-loop stability `often' needed (exceptions: Tell, et al. ACC-05, and a few references there) • A single controller/augmentations for all saturation levels (even almost zero?), disturbances, tracking signals, etc.
Explicit – direct – approach • Low-high gain (Saberi and Lin, 199x) • Early LPV : Nguyen and Jabbari (1999, 2000), Scorletti, et al (2001) • Scheduling: Older work (full state): • Gutman and Hagander (1985) • Wredenhagen and Belanger (1994) • Megretski (1996 IFAC) • Scheduling: Recent work} • Lin (1997), a little bit of observer • Teel (1995), Tarboriech, et al (1999, 2000) - state feedback • Wu, Packard and Grigoriadis (2000) - pure LPV • Stoustrup (2005-07) • Kose and Jabbari (2002, 2003)
Direct Approach • Stability and performance guarantees • Performance not strong in small signal operation `Some' have nice properties: • A family of controllers (rather than one) • Computationally tractable (e.g., a convex search) • High actuator utilization • Performance guarantees dependent on actuator size and disturbance estimate • Approach flexible to incorporate different design approaches, actuator rate limits, state constraints, tracking, etc.
Basic Idea 1: Combining with Scheduling • Start with a nominal controller (from somewhere!) • Keep it as long as possible • Once saturated, switch to a new (family of) of controller (s) that can avoid saturation but can provide guaranteed stability and performance • Make sure there are no `cracks' or escape routs! Assumptions: • Full state or full order controllers (relaxed later) • Disturbance attenuation problem (for now) • Information of worst case disturbance (e.g. energy or peak) • A small number of controllers (for now -- technical detail)
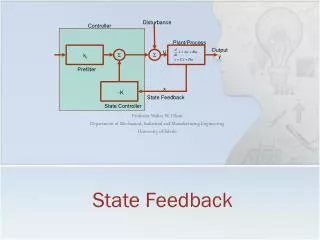
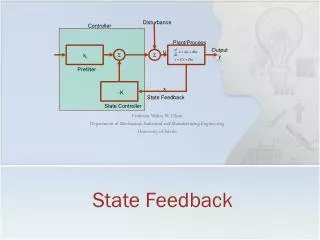
System and Controllers Disturbance attenuation problem (ACC & CDC 07) Open loop system Assumption: known wmax (Possibly conservatively) Requirement: closed loop stability, boundedness (e.g., ISS), acceptable performance Key: Use of ellipsoids Given Nominal Controller State Feedback or Output Feedback
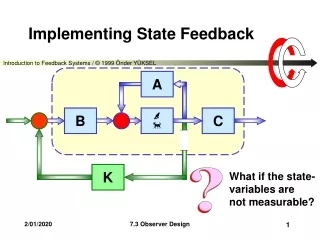
A simple `safe’ controller • Objective: -Use Knom(s) as long as possible, -Once Knom(s) saturates, implement Ksafe(s) that ensure reasonable behavior • Steps: - Analysis: What is the largest disturbance the system can tolerate? Wnom - Synthesis Constructing the safe controller
x2 x1 Analysis 2 Wmax>Wnom Max β Wnom=(1/β)1/2
2 3 Safe 1 Nom 1 2 3 Synthesis Wmax>Wnom
Full State-Feedback Control (ACC 07) • Synthesis (Wmax>Wnom) Key condition MIN gamma or δ FSAFE=XQ-1
Safe Switch Condition Ensures Boundedness
Scheduling • Conservatism 1) 2) Elliptic invariant set is conservative
Scheduling • Scheduling: Putting Intermediate Controllers
Full State-Feedback Control • SchedulingWN=WL<WN-1<…W2<W1=Wmax ; QN=Qnom For i=1:N-1 Min Ki =Xi Qi-1 i=1,2,..N
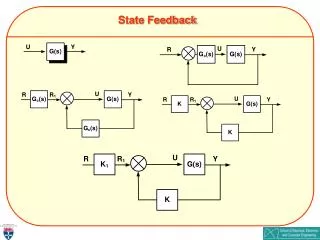
Output Feedback (CDC 07) WLOG Assume Fact: Switch Condition
Full State-Feedback Control • Example Wnom=2.76 Possible to be exposed to Wmax=15
Full State-Feedback Control W1=Wmax=15; W2=10; W3=5; W4=Wnom=2.76
Full State-Feedback Control Sys. res. in scheduled case vs. the original sys. Res. Switch history
Output Feedback Example Given nominal controller in the form Analysis: Wnom=1.55 Synthesis: Wmax=5
Future Work • Continuous (e.g., spline based) family of controllers: messy but straight forward (will place a bound on how fast the gain can be increased) • Mismatch in order of controller and plant: augment the order of the controller • Tracking • Non-ellipsoidal sets • Adding scheduling to the traditional anti-windup scheme …….
Going the other way around: • Start with a basic Ant-windup set up • Use Different anti-windups for different levels of saturation • Shouldn’t small saturation leave to better performance guarantee than a sever saturation? (Ans: yes!) • But first: Something interesting shows up!! • Let us review the basic `Static’ anti-windup set up
Static Anti-windup d y r u + Sat(.) K(s) P(s) - + - AW q
Static Anti-windup Stability and Wellposedness: Small Gain Theorem
Static Anti-windup Performance (stability): L2 Gain Q>0 , M>0 Λ=XM-1
Example (Static Anti-windup) Grimm, G., Teel, A.R., and Zaccarian, L., “Results on Linear LMI-Based External Anti-windup Design”, IEEE Trans. on Automatic Control, Vol. 48, No. 9, Sep. 2003.
Example (Static Anti-windup) System output and input history when anti-windup augmentation applied
Over-saturated Anti-windup d y r u + Sat(.) K(s) P(s) -
Over-saturated Anti-windup Performance of saturated system for G(t)є [g,1] Q>0
Over-saturated Anti-windup Performance (stability) of Over-saturated Anti-windup: L2 Gain Q>0 Λ=XM-1
Over-saturated Anti-windup System response: Anti-windup, Over-saturated Anti-Windup, Unconstrained Nominal Traditional Anti-windup: Over-saturated Anti-windup:
Example (Over-saturated Anti-windup) Simulation example of F8 aircraft Elevator, limited to ±25 degree Flapron, limited to ±25 degree input Pitch angle Flight path angle output Kapasouris, P., Athans, M., and Stein, G., “Design of Feedback Control Systems for Stable Plants with Saturating Actuators”, Proceeding of the 27th IEEE Conf. on Decision and Control, Austin, TX, December 1988.
Example (Over-saturated Anti-windup System response: Unconstrained Nominal, Anti-windup, Unconstrained Nominal
Example (Over-saturated Anti-windup) System response: Anti-windup, Over-saturated Anti-Windup, Unconstrained Nominal
Summary • Tradeoff between `matched uncertainty’ vs better performance guarantee • Dynamic Anti-windup case: Reasonably straight forward: the uncertainly is of the LPV (self-scheduled) variety – constant Lyapunov functions suffice • Combine `over saturation’ and scheduling is next!