Download
1 / 12
120 likes | 308 Views
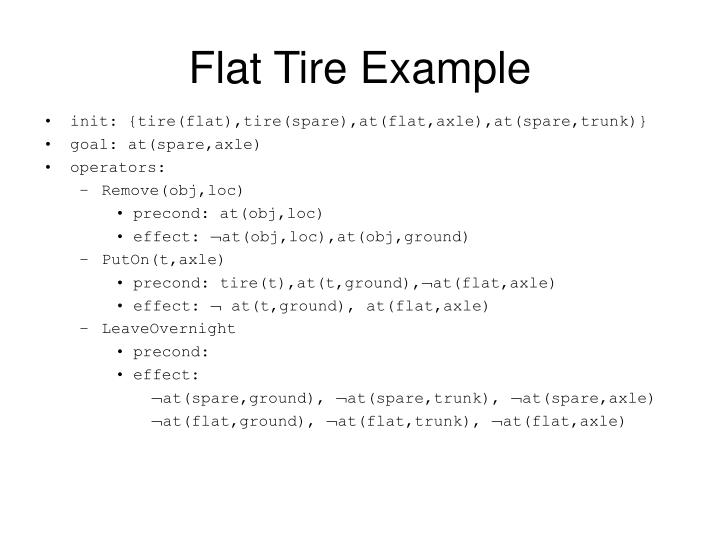
Flat Tire Example. init: {tire(flat),tire(spare),at(flat,axle),at(spare,trunk)} goal: at(spare,axle) operators: Remove(obj,loc) precond: at(obj,loc) effect: at(obj,loc),at(obj,ground) PutOn(t,axle) precond: tire(t),at(t,ground),at(flat,axle) effect: at(t,ground), at(flat,axle)

E N D
Flat Tire Example • init: {tire(flat),tire(spare),at(flat,axle),at(spare,trunk)} • goal: at(spare,axle) • operators: • Remove(obj,loc) • precond: at(obj,loc) • effect: at(obj,loc),at(obj,ground) • PutOn(t,axle) • precond: tire(t),at(t,ground),at(flat,axle) • effect: at(t,ground), at(flat,axle) • LeaveOvernight • precond: • effect: at(spare,ground), at(spare,trunk), at(spare,axle) at(flat,ground), at(flat,trunk), at(flat,axle)
SatPlan • propositionalization • create separate literals for each ground instance of each fluent for each state index • e.g. on_a_b_1 , on_a_b_2 , on_a_b_3, gripper_empty_1, gripper_empty_2... • create propositions for action taken at step t: pickup_a_b_1... • convert axioms in FOL to propositional sentences (one copy for each time index) • possibility axioms: s,a Prec(s)Poss(a,s) • gripper_empty_1clear_a_1 poss_pickup_a_1 • gripper_empty_2clear_a_2 poss_pickup_a_2 • gripper_empty_1clear_b_1 poss_pickup_b_1 • successor axioms: s Poss(a,s)Eff(result(a,s)) • poss_pickup_a_1 pickup_a_1 holding_a_2gripper_empty_2 • frame axioms: s Flu(s)aCancelingActionsFlu(result(a,s)) • on_b_c_1 poss_pickup_a_1on_b_c_2 • use a satisfiability solved like DPLL or WalkSat • query: poss_on_a_b_1? poss_on_a_b_2? poss_on_a_b_3? • the truth values of action propositions in the model tell you the plan • pickup_c_a_1=T, puton_c_table_2=T, pickup_b_table_3=T, puton_b_a_4=T
Plan Abstraction • the idea: simplify problem by temporarily “dropping” easy preconditions • defer solving them till later • make high-level plan, then fill in details • system: ABSTRIPS • example: • make a high-level plan for solving 8-puzzle where you assume you can move pieces without empty space
Hierarchical Task Networks (HTNs) • plan library • a list of standard operating procedures, written out in procedural syntax • ExecuteMissionWithHelicopters: • preconds: haveHelicopters, knowTargetCoordinates • steps: {FlyFlightPlan,Engage,ReturnToBase} • high-level operators vs. low-level operators • expansion, multiple choices of how to achieve subtask • still a problem of sub-goal interactions • system: STEAM
enter room sense light off(light)? flip(switch) next action • plan monitoring and repair • what if action in step i might fail? • non-deterministic domains (most in real-world) • at each step, check pre-conditions • if expected conditions not satisfied, re-invoke planner • costly to re-plan from scratch • search for modification of existing plan, e.g. re-do previous action or insert steps to get back on track • contingent planning: • a plan with a branch in it • include sensor actions to sense state • algorithm to create such plans to achieve goals • goal regression? • universal planners: generate state-action tables, finite-state machines {pickupA, senseHolding, while not holding do {pickupA,senseHolding}} {swingAx, senseTree, while TreeStanding do {swingAx,senseTree}}
plan optimization • use heuristics to search for a plan that minimizes cost of operators, or time... • start by finding any plan that achieves goals, and then apply incremental modifications • related to scheduling • critical path method (CPM) – compute [ES,LS] • resource constraints (e.g. 1 machine to add engine)
Robotics • basic approach: • navigation in configuration space – find path from initial configuration to goal configuration • # dimensions = degrees of freedom (parameters that can be controlled, e.g. joint angles) • find path; avoid collisions with “obstacles”