Download
1 / 13
130 likes | 141 Views
Explore rotational motion, angular velocity, kinetic energy, moments of inertia, and more. Study the dynamics of rotating bodies and the principles of moments of inertia for effective physics understanding and application. Check out the comprehensive textbook by Chris Parkes.

E N D
Dynamics Dynamics Rotational Motion Angular velocity Angular “suvat” Kinetic energy – rotation Moments of Inertia KE – linear, rotation READ the Textbook! Part III –“What we know is a drop, what we don't know is an ocean.” http://www.hep.manchester.ac.uk/u/parkes/Chris_Parkes/Teaching.html Chris Parkes October 2012
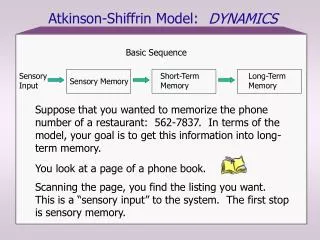
Rotation of rigid bodyabout an axis v • θ in radians • 2πr is circumference • Angular velocity • same for all points in body • Angular acceleration s = rθ r θ r is perpendicular distance to axis ds r dθ
Rotational Motion This week – deal with components, next week with vectors Linear Rotational Position, x Angle, θ Velocity, v angular velocity, ω Acceleration angular acceleration, α Rotational “suvat” derive: constant angular acceleration
Rotational Kinetic Energy X-section of a rigid body rotating about an axis through O which is perpendicular to the screen r1 is perpendicular dist of m1from axis of rotation r2 is perpendicular dist of m2from axis of rotation r3 is perpendicular dist of m3from axis of rotation ω m1 m2 r1 r2 O r3 m3
Moment of Inertia, I masses m distance from rotation axis r • corresponding angular quantities for linear quantities • x; v; pL • Mass also has an equivalent: moment of Inertia, I • Linear K.E.: • Rotating body v, mI: • Or p=mv becomes: Conservation of ang. mom.: e.g. frisbee solid sphere hula-hoop pc hard disk neutron star space station R1 R2 R R
Moment of Inertia Calculations Systems of discrete particles Four equal point masses , each of mass 2 kgare arranged in the xy plane as shown. They are connected by light sticks to form a rigid body. What is the moment of inertia of the system about the y-axis? y 2 kg x 2 kg 2 kg I = 2 x (2 x12) + (2 x 22) = 12 kg m2 2 kg 1m 2m
Parallel-Axis Theorem • Moment of Inertia around an axis axis parallel to first at distance d • Co-ordinate system origin at centre-of-mass yA xA • Proof Since centre-of-mass is origin of co-ordinate system
Translation & Rotation • Combining this lecture and previous ones • Break problem into • Velocity of centre of mass • Rotation about axis ω
Rolling without Slipping • Bicycle wheel along road • Centre – pure translation • Rim –more comlex path known as cycloid • If no slipping
R R M M m h h v m A light flexible cable is wound around a flywheel of mass M and radius R. The flywheel rotates with negligible friction about a stationary horizontal axis. An object of mass m is tied to the free end of the cable. The object is released from rest at a distance h above the floor. As the object falls the cable unwinds without slipping. Find the speed of the falling object and the angular speed of the flywheel just as the object strikes the floor.
KEY POINTS • Assume flywheel is a solid cylinder • Note – cable is light – hence ignore its mass • Note – cable unwinds without slipping - speed of point on rim of flywheel is same as that of the cable • If no slipping occurs, there must be friction between the cable and the flywheel • But friction does no work because there is no movement between the cable and the flywheel R M h v m A light flexible cable is wound around a flywheel of mass M and radius R. The flywheel rotates with negligible friction about a stationary horizontal axis. An object of mass m is tied to the free end of the cable. The object is released from rest at a distance h above the floor. As the object falls the cable unwinds without slipping. Find the speed of the falling object and the angular speed of the flywheel just as the object strikes the floor.
Example A bowling ball of radius R and mass M is rolling without slipping on a horizontal surface at a velocity v. It then rolls without slipping up a slope to a height h before momentarily stopping and then rolling back down. Find h. v = 0 ω = 0 h v No slipping so no work done against friction – Mechanical energy conserved