Download
1 / 21
240 likes | 851 Views
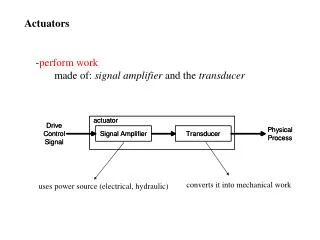
Piezoelectric Actuators. Prepared by Micah Pack ECE 5320 Mechatronics Assignment #1. Outline. References To Explore Further Major Applications Basic Working Principle Typical Sample Configuration in Application Major Specifications Limitations How to Choose Cost Information

E N D
Piezoelectric Actuators Prepared by Micah Pack ECE 5320 Mechatronics Assignment #1
Outline References To Explore Further Major Applications Basic Working Principle Typical Sample Configuration in Application Major Specifications Limitations How to Choose Cost Information Where to Buy
References Mechatronics Handbook edited by Robert Bishop pg. 21-51 thru 21-63 ISBN: 0-8493-9257-8 www.pi.ws(Physik Instrumente)
To Explore Further Mechatronics Handbook pg. 21-51 thru 21-63 www.pi.ws(Physik Instrumente)
Major Applications Micromanipulation Noise and Vibration Suppression Systems Valves Lasers and optics Ultrasonic Motors Positioning Devices Relays Pumps Automotive Industry Industrial Automation Systems Telecommunications Computers
Major Applications “Owing to the inherent properties of piezomaterials, actuators with a lot of engineering advantages can be developed. Some of them [engineering advantages] are:” compact and lightweight rapid response practically unlimited resolution no magnetic field large force generation broad operating frequency range high stability solid state low power consumption displacement proportional to applied voltage 50% energy conversion efficiency.
Basic Working Principle “The piezoelectric effect was discovered by the Curie Brothers in 1880. The direct piezoelectric effect contains the ability of certain materials, which are called pieziomaterials, to generate electric charge in proportion to externally applied force. The effect is reversible and then is called an inverse piezoelectric effect.”
Basic Working Principle “Coupled electric and mechanical constitutive equations of piezoelectric materials for one-dimension medium are:” S = sET + dtE D = εTE + dT “Where S is strain, T is stress (N/m^2), E is electric field strength (V/m), D is electric displacement (C/m^2), sEis the compliance of the material (m^2/N) when the electric field strength is constant, εT is the permittivity under constant stress, and d is piezoelectric constant (m/V or C/N). The superscript t stands for matrix transpose.”
Basic Working Principle • The maximum force (blocked force) a piezo actuator can generate depends on its stiffness and maximum displacement Maximum Force that can be generated with an infinitely ridged restraint Maximum force that can be generated in a real restraint Fmax is the maximum force [N] KT is the peizo actuator stiffness [N/m] Ks is the stiffness of the restraint ΔLo is the maximum nominal displacement without external force or restraint
Typical Sample Configuration in Application Fast steering mirrors: Require fast and accurate response within a limited range of motion. • Stacked linear actuators
Typical Sample Configuration in Application • Laminar Design / Linear Actuators. • These actuators are built using multiple thin ceramic strips. When the strips are excited by an electric voltage they cause the actuator to shrink.
Typical Sample Configuration in Application • Tubular design / columns • One of the surfaces is silvered, and when a voltage is applied it causes the tube to shrink
Typical Sample Configuration in Application Suppression of oscillations: Piezoactive materials-based dampers convert mechanical oscillations into electrical energy. Generated energy is then shunted to dissipate the energy as heat, oscillation energy is eliminated. Microrobot: Robot platform legs are piezoactuators. By applying voltage to the electrodes, piezolegs are lengthened, shortened, or bent in any direction in a fine movement. Micropump: Diaphragm is actuated by piezoactuator, input and output check valves are subsequently opened for liquid or gas pumping. Advantages are fast switching and high compression rate.
Typical Sample Configuration in Application • Microgripper: • Piezoactuator works on contraction for gripping motion based on the compliant mechanism. Gripper is of very small size and almost any required geometrical shape. • Micromanipulator: • Due to the unlimited resolution, piezoactuators are used in numerous positioning applications. • Microdosage Device: • Piezoactuators allow high precision dosage of a wide variety of liquids in a range of nanoliters for various applications.
Major Specifications There are 2 predominate types of piezoelectric actuators. “Monolithic-sintered, low-voltage actuators (LVPZT) operate with potential differences up to about 100 V and are made from ceramic layers from 20 to 100 µm in thickness.” “Classical high-voltage actuators (HVPZT), on the other hand, are made from ceramic layers of 0.5 to 1 mm thickness and operate with potential differences of up to 1000 V. High-voltage actuators can be made with larger cross-sections, making them suitable for larger loads than the more-compact, monolithic actuators.”
Major Specifications • Other major specs: • Typical actuators have stiffness between 1 and 2,000 N/µm and compressive limits between 10 and 100,000 N. • Travel ranges of piezoactuators are typically between a few tens and a few hundreds of µm (linear actuators). Bender actuators and lever amplified systems can achieve a few mm. • Piezoceramics are not subject to the “stick slip” effect and therefore offer theoretically unlimited resolution. In practice, the resolution actually attainable is limited by electronic and mechanical factors:
Limitations Sensor and servo-control electronics (amplifier): amplifier noise and sensitivity to electromagnetic interference (EMI) affect the position stability. Mechanical parameters: design and mounting precision issues concerning the sensor, actuator and preload can induce micro-friction which limits resolution and accuracy. In order to be created many of the piezoceramics must be heated above the Curie temperature and then exposed to a high potential field. This process is called “poling’ This causes the electric dipoles to realign after cooling these ceramics display the pezio effect. Thus heating actuators created using this method will cause there piezoelectric properties to degrade. The figure shows the allingment of the electric dipoles prior, during, and after “poling” from left to right.
Limitations • PZT ceramic material can withstand pressures up to 250 MPa (250 x 106 N/m2) without breaking. This value must never be approached in practical applications, however, because depolarization occurs at pressures on the order of 20 % to 30 % of the mechanical limit. • PZT ceramics are brittle and cannot withstand high pulling or shear forces
How to Choose The choice of actuator depends on the desired application. Best for applications requiring small range of motion with very high accuracy and speed.
Cost Information Call for Quotes
Where to Buy Digikey www.pi.ws(Physik Instrumente) http://piezojena.com/