Download
1 / 15
150 likes | 245 Views
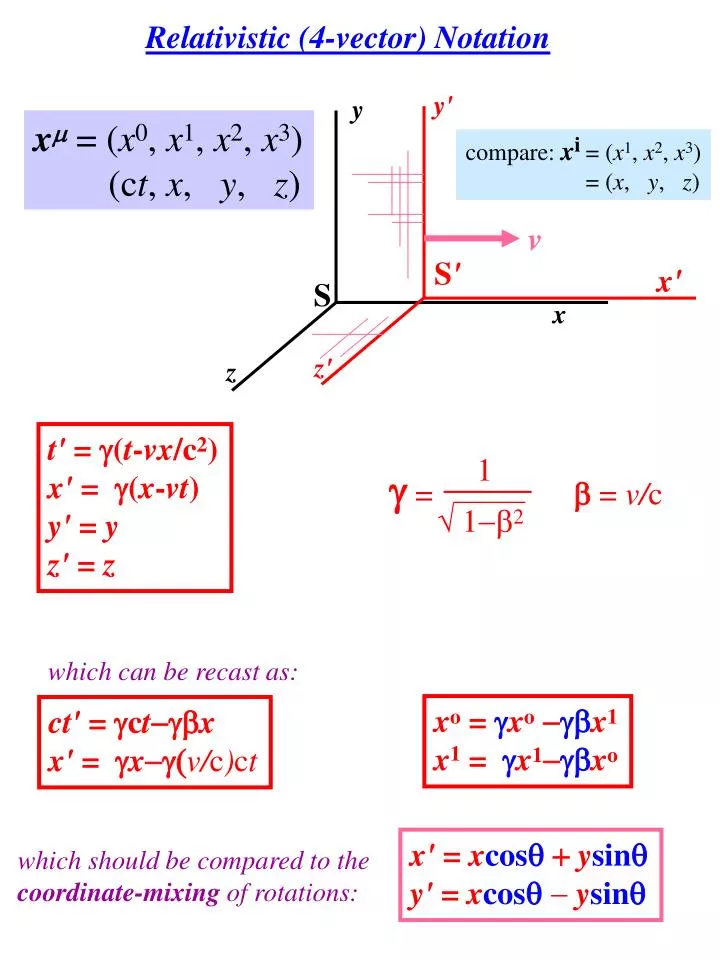
Relativistic (4-vector) Notation. y'. y. x m = ( x 0 , x 1 , x 2 , x 3 ) (c t , x , y , z ). compare: x i = ( x 1 , x 2 , x 3 ) = ( x , y , z ). v. S '. x'. S. x. z'. z. t' = g ( t - vx /c 2 ) x' = g ( x - vt ) y' = y

E N D
Relativistic (4-vector) Notation y' y xm = (x0, x1, x2, x3) (ct, x, y, z) compare: xi = (x1, x2, x3) = (x, y, z) v S' x' S x z' z t' = g(t-vx/c2) x' = g(x-vt) y' = y z' = z 1 1-b2 g = b = v/c which can be recast as: xo= gxo-gbx1 x1= gx1-gbxo ct' = gct-gbx x' = gx-g(v/c)ct x' = xcos + ysin y' = xcos- ysin which should be compared to the coordinate-mixing of rotations:
Noticing: we write: exactly same form! x0' x1' x2' x3' g -gb0 0 -gbg0 0 0 0 1 0 0 0 0 1 x0 x1 x2 x3 = compared to rotations about the z-axis: x0' x1' x2' x3' 100 0 0 cossin0 0 -sincos 0 0 0 0 1 x0 x1 x2 x3 =
World line of particle moving in straight line along the x-direction ct ct´ ct1 event x´ x vt1 The Lorentz transformation is not exactly a ROTATION, but mechanically like one. We will consider it a generalized rotation. But now, the old “dot product” will no longer do. It can’t guarantee invariance for many of the quantities we know should be invariant under such transformations. The fix is simple and obvious…
To help keep track of the sign conventions, we introduce the metric tensor: 1 0 0 0 0-10 0 0 0 -1 0 0 0 0 -1 gmn = xm xm contra-variant 4-vector co-variant 4-vector Then our “dotproduct” becomes and a lowered index means the metric tensor has been applied Notice we argue: or
summed over The lowered index just means that is in the appropriate form to “dot” into a vector Since the is raised, the above multiplication gives (x´ ) Notice: means has been multiplied by the metric tensor!
Now notice that (g) = = g
Also notice: T = which means gT =g or but (g)T = g This is because: (g)T = TgT = g = g
So as an exercise in using this notation let’s look at The indices indicate very specific matrix or vector components/elements. These are not matrices themselves, but just numbers, which we can reorder as we wish. We still have to respect the summations over repeated indices! And remember we just showed (g) = g i.e. All dot products are INVARIANT under Lorentz transformations.
as an example, consider rotations about the z-axis even for ROTATIONS
The relativistic transformations: suggest a 4-vector that also transforms by so should be an invariant!
In the particle’s rest frame: px = ? 0 mc2 pp = ? m2c2 E = ? In the “lab” frame: = -mv E c = = mc so ?
Limitations of Schrödinger’s Equation 1-particle equation 2-particle equation: mutual interaction But in many high energy reactions the number of particles is not conserved! np+e++e n+p n+p+3 e-+ p e-+ p + 6 +3g




![CP = E[ s 2 , s 5 , s 1 , s 3 , s 2 ’ , s 3 ’ , s 4 , s 1 ’ , s 4 ’ , s 5 ’ ] S[] I[]](https://cdn3.slideserve.com/6546826/slide1-dt.jpg)