Download
1 / 17
170 likes | 285 Views
Robotic Arm Controlled Biopsy Needle. Team Members: Ryan Augustine Brian Frederick Nate Gaeckle Gordy Lawrence Client: Dr. Myron Pozniak Advisor: Dr. Naomi Chesler. CT Procedure. Initial CT taken Splices are integrated to form image

E N D
Robotic Arm Controlled Biopsy Needle Team Members: Ryan Augustine Brian Frederick Nate Gaeckle Gordy Lawrence Client: Dr. Myron Pozniak Advisor: Dr. Naomi Chesler
CT Procedure • Initial CT taken • Splices are integrated to form image • Physician manually inserts needle in appropriate trajectory and distance • Inaccurate – chance of failure • A more precise system needs to be developed
ImageGuide • Produced robotic arm technology • Computer receives information from the CT • Controls movement of arm in 6 degrees of freedom • Currently has mechanism to advance needle at rate of 2 cm/s
Design Requirements • Needle must be advanced subcutaneous before firing • Needle must be fired fast enough to utilize inertia of body tissue • Needle must be extracted rapidly with tissue sample • Work in conjunction with ImageGuide technology • computer system to control position • Preserve remote center of motion • Device must not be any longer than 30 cm • Radiolucent material • Must have redundant safety checks
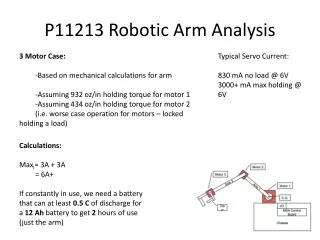
Mechanical Driver • Doctor Manually controls speed and advancement of needle • Sensor advances to control distance needle travels • Gear ratio is optional
Hydraulic Design Option Fluid Compressor Unit Linear Drive Mechanism
Hydraulic Design Option • Pros • Can be rapidly fired and retracted by dual piston action • Can be manufactured with materials compatible with CT Imaging. • Will generate enough power and velocity for design requirements • Cons • Difficult to design • Accuracy maintained over many usages
Pneumatic • Can be rapidly fired and retracted by air • Can use radiolucent materials • Can generate enough force needed • Difficult to design
Other Designs • Sewing Machine • Rotary Cam • Solenoid
Design Matrix ____________________________________________________________________________________________________________________________________________
Future Work • Determine more specific design specifications • Meet with Hydraulic/Pneumatic expert • Decide on most promising design option • Begin prototype design • And hopefully, prototype testing and refining
References • ImageGuide, Inc. Feb. 16, 2004. Image-Guided Robotics for Minimally Invasive Cancer Diagnosis and Therapy. PowerPoint Presentation. • Pozniak, M. 2004. Personal Interview.