Download
1 / 48
500 likes | 549 Views
Dive deep into the world of robot subsystems with this comprehensive guide presented by Lynbrook Robotics Team 846. Learn about pneumatics, electric components, and sensors, with detailed explanations and tips provided by experts in the field.

E N D
Presented By: Lynbrook Robotics, Team 846 John Chai, David Liu, Aashish Sreenharan, Michael Wachenschwanz, and Toshi Tochibana Available online at lynbrookrobotics.com Tech > Resources > “WRRF Presentations” Introduction toRobot Subsystems
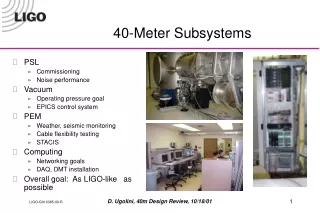
Talk Outline • Pneumatics • Sensors and Electronics • Electrical Components • Robot Drive Train Design
Michael Wachenschwanz and Toshi Tachibana present… Pneumatics
Pneumatics • Can you feel the pressure • Pneumatics is the use of pressurized air to achieve mechanical movement. • Air tends to move from high pressure to low pressure • Important note: There is no such thing as a negative pressure
Compressor • Where it all starts • The compressor takes air from the surrounding atmosphere and compacts it via pistons. • Comes with a release valve attached to it
Pressure Switch • Better safe than sorry • Safety Mechanism • Turns the compressor off at 120 psi and turn it back on at 115 psi
Tubing and Fittings • Keeping connected
Tank • The more the merrier • Tanks allows more air in the system. • When air is lost, psi drop is mitigated by larger tanks
Plug Valves • Done for the day • Releases all the compressed air in the system. • Must be release manually • Be sure to release the stored air when done with the system
Regulator • Stay in control • Regulators regulate the pressure. • Uses air from input to maintain the pressure of the output • Usually kept at 60 psi for FIRST competitions
Electric Valves • Handling the pressure • Single and double solenoid valves are used • Controlled by the control board via electricity • Double solenoids exposes one port to pressure and the other to the surrounding atmosphere
Actuators • Use the force • Actuators convert the difference in air pressure to mechanical motion • Linear actuators, or cylinders, are the more common actuators. For the competition, they come in 3 bore sizes: ¾, 1 ½, and 2 inches • Rotary actuators are also allowed
Notes on Actuators • Force = Pressure x Area • Area= pi x squared radius • radius = diameter (bore) / 2 • Retracting force is less than extending force
Flow Rate Valve • Control the flow • Simply a fitting that widen or narrows the flow path of the air • Used to slow the air movement, thus slowing mechanical movement • Does not take away from the net force. • Must be adjusted manually
Aashish Sreendharan presents… Electrical Components
Motors - CIM • Used to drive robot
Motors – Van Door • Powers doors on mini-vans
Motors – Fisher Price Motors • Used on Fisher Price Toys • Made by Johnson Electric or Mabuchi.
Power Distribution Explained • Battery (12V, Lead-Acid Battery) • Main Circuit Breaker • Power Distribution Block • Components: • Victors (ESC) • Spikes • Controller
Spikes Relays • Control direction. • Two single pole, double throw relays. • Forward = 12V to M+ and M- grounded. • Reverse = 12V to M- and M+ grounded. • Neutral = M+ and M- grounded, or 12V applied. • H-Bridge.
H - Bridge • 4 Switches. • Combination of switches on to drive motor.
Electronic Speed Controllers • Known as: Victors. • Use Victor 884's. • Control speed and direction. • Uses PWM.
Pulse Width Modulation • Two Types: • Power Delivery • Control Signal
David Liu presents… Sensors and Electronics
Pulse Width Modulation • Two types • Power transfer • Between speed controller and motor • Signaling • Between controller and speed controller
Potentiometers (Pots) • Sensor for measuring position: • Rotation, distance, etc.
Potentiometers Simplest type: Slider Acts as a Voltage Divider Slider is connected to output. +5V +5V +5V 0V 5V 2.5V 4.2V 3.3V Output 10 KΩ GND GND 9 KΩ 3 KΩ GND 3.5V 0.5V 7 KΩ 1 KΩ
Reading the Value • Analog voltage level • Analog-to-Digital Converter (ADC) • Converts to number • 0-1023 for 10-bit ADC
Pots: Uses • Sense position: e.g. lift • How to sense the lift position? • Travel length is 6 feet • No linear pot long enough • Rotary Pots
Pots • Multi-turn pot: • Screw with wiper resting on threads • Usually 3, 5, or 10 turns • Alignment is important! • Continuous rotation: use encoder
Optical Encoders to controller to controller Optical Sensor Optical Sensor
Optical Encoders to controller to controller Optical Sensor Optical Sensor
Optical Encoders • Determining Distance Travelled • Count pulses • Example: • Given: Encoder stripes = 128 • Given: Wheel diameter = 6” • Given: counted 85 pulses = 12.52 inches
Optical Encoders • Determining Speed • A. Count pulses per interval • Example: in 1 second, 256 pulses. Speed = 2 revolutions/second • Inaccurate and slow • Analogy: On a bicycle • Mark the wheel • Count passes in a minute
Optical Encoders • Determining Speed • B. Measure time between pulses • Example: time between two pulses = 3.9ms • Only requires observing two consecutive pulses
Ultrasonic Sensors • Determine distance • Send pulse of sound • Measure time until echo
Johnathan Chai presents… Robot Drive Train Design
Required Capabilities • Speed • Point-to-point Movement • Turning in place • Controllable
Skid/Tank Steering • Power left and right sides independently • Joystick control
Ackerman Steering • Limited turning due to geometry Team 34’s Design on Chief Delphi
4 Wheels • Fast but slides on ground when turning • Wide vs. Long base
6 Wheels • Center wheels dropped about a quarter inch • “Rock” on center when turning
Swerve Drive • Maneuverability • Time costs Craig Hickman’s Design on Chief Delphi
Wheels • Rubber • Roughtop • Mecanum • Omni-wheels • Tank Treads AndyMark Wheels
Conclusion • Covered major components of FIRST robots • Slides available at lynbrookrobotics.com • Tech > Resources > “WRRF Presentations”