Download
1 / 10
100 likes | 238 Views
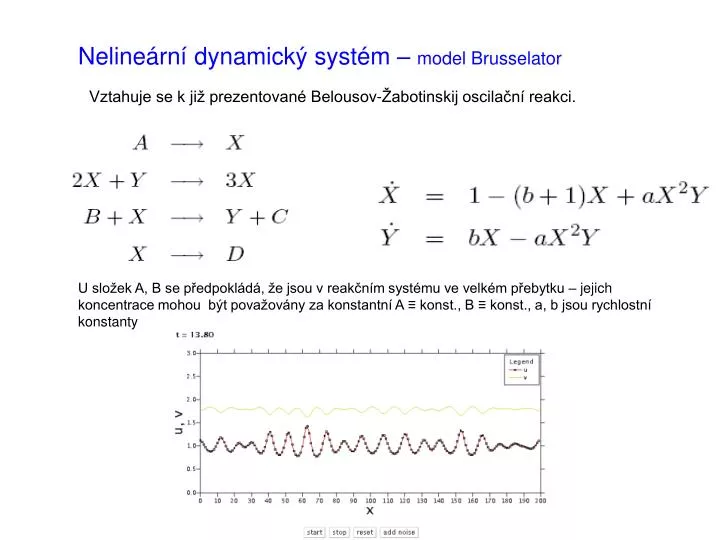
Nelineární dynamický systém – model Brusselator. Vztahuje se k již prezentované Belousov-Žabotinskij oscilační reakci.

E N D
Nelineární dynamický systém – model Brusselator Vztahuje se k již prezentované Belousov-Žabotinskij oscilační reakci. U složek A, B se předpokládá, že jsou v reakčním systému ve velkém přebytku – jejich koncentrace mohou být považovány za konstantní A ≡ konst., B ≡ konst., a, b jsou rychlostní konstanty
Nelineární dynamický systém – Lorentzůvmodel konvekce v atmosféře
Dynamický systém – příklad loužení As z povrchu elektrárenského popílku
Základní numerické metody řešení dynamických systémů - soustav obyčejných diferenciálních rovnic Jde o systémy se soustředěnými parametry – popsány soustavami obyčejných diferenciálních rovnic pro stavové proměnné v závislosti na čase – tj. úlohy s počátečními podmínkami. Uvedené příklady nelineárních dyn. systémů (Brusselator, Oregonator, Lorentz model) nezahrnují žádný parametr s dopředu determinovaným časovým průběhem – systémy jsou autonomní Eulerova jednokroková metoda
Základní numerické metody řešení dynamických systémů - soustav obyčejných diferenciálních rovnic Eulerova jednokroková metoda – implicitní (zpětná – backward) Stejná diferenční aproximace (explicitní, implicitní) je samozřejmě užívána i v případě soustav obyčejných dif. rovnic. V průběhu řešení - při výpočtu n+1 kroku proměnné řešené v druhé rovnici je parametr počítaný v rovnici předchozí k dispozici již ve stavu n+1, ostatní parametry se pak dosazují ve stavu z předchozího n-tého kroku.
Základní numerické metody řešení dynamických systémů - soustav obyčejných diferenciálních rovnic Runge – Kutta metody Carle David Tolmé Runge, Martin Wilhelm Kutta (němečtí matematikové) Hledaná funkcionální závislost Lokální chyba obecné jednokrokové metody Relativní přírůstek přesného řešení
Základní numerické metody řešení soustav obyčejných diferenciálních rovnic - Runge Kutta metoda Pro lokální chybu pak platí: Totální derivace řešené rovnice: dle x = fx + fy . y’ derivace vyjádřeny indexy Dle Taylorova rozvoje pro přírůstek přesného řešení platí: Nejlepší řešení pro funkci Φ, z které je počítán přírůstek řešení je tedy: Příslušné derivace však nejsou k dispozici – lze je aproximovat lineární kombinací funkčních hodnot ve vhodně zvolených bodech - podstata Runge Kutta metody
Základní numerické metody řešení soustav obyčejných diferenciálních rovnic - Runge Kutta metoda Fce Φ je hledána jako lineární kombinace ω1, ω2, α, β– konstanty, které je třeba určit tak, aby rozvoj fce Φjako fce proměnnéh souhlasil co nejlépe s rozvojem fce Δ k1 = f(x,y) = y’ Rozvoj fce Φ podle h pro druhý řád (viz navržená lin. kombinace) stačí do h1 + chyba v h2 Vztahy pro hledané konstanty obdržíme porovnáním koeficientů u stejných mocnin s Taylorovým rozvojem pro přírůstek přesného řešení Δ(x,y,h) Soustava má nekonečně mnoho řešení, pro každé řešení exist. libovolné t ≠ 0 Tj. rozvoj fce Φ slouží pouze pro potřeby nalezení konstant, které jsou následně zpětně dosazeny do Φnavržené ve tvaru lineární kombinace, čímž je získán konečný výsledek Runge Kutta metoda v obecnosti – lineární kombinace s parametrů
Základní numerické metody řešení soustav obyčejných diferenciálních rovnic - Runge Kutta metoda Runge – Kutta (Rungovy-Kuttovy) metody druhého řádu Vznikly z vztahů pro druhý řád (na předchozí straně) dosazením t = 1 a t = 1/2 Runge – Kutta metody čtvrtého řádu – nejčastěji prakticky užívané Runge – Kutta metody třetího řádu