Download
1 / 18
190 likes | 494 Views
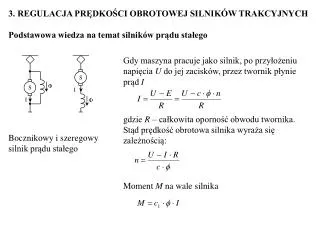
Przykład 5: obiekt – silnik obcowzbudny prądu stałego. Cel budowy modelu: chcemy wpływać zmianami napięcia twornika na prędkość kątową silnika – potrzebny jest nam model ustalający prawo przetwarzania napięcia twornika w prędkość kątową silnika. Cześć elektryczna – obwód twornika.

E N D
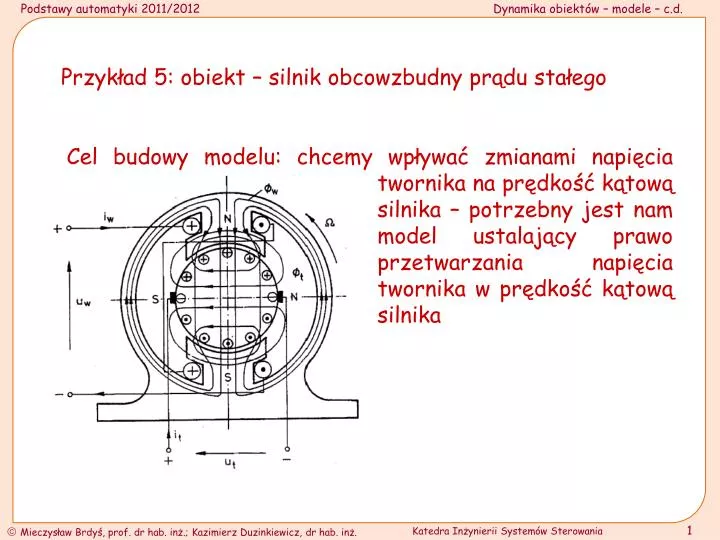
Przykład 5: obiekt – silnik obcowzbudny prądu stałego Cel budowy modelu: chcemy wpływać zmianami napięcia twornika na prędkość kątową silnika – potrzebny jest nam model ustalający prawo przetwarzania napięcia twornika w prędkość kątową silnika
Cześć elektryczna – obwód twornika Cześć elektryczna – obwód wzbudzenia Wyróżnienie trzech podsystemów: mechanicznego elektrycznego – obwodu twornika elektrycznego – obwodu wzbudzenia
Założenia: 1. obwody magnetyczne silnika pracują w zakresie liniowych części charakterystyk magnesowania 2. prąd wzbudzenia silnika utrzymywany jest na stałej wartości 3. moment oporowy zewnętrzny jest pomijalnie mały, silnik musi pokonywać moment oporowy wewnętrzny i moment bezwładności
Model matematyczny – część mechaniczna: Równanie różniczkowe: lub: z warunkiem początkowym: Część mechaniczna
- napięcie na zaciskach obwodu twornika - spadek napięcia na rezystancji obwodu twornika - siła elektromotoryczna indukowana w uzwojeniu twornika Część elektryczna – obwód twornika Budowa modelu: Prawo równowagi – warunek spójności - II prawo Kirchhoff’a dla obwodu twornika:
1. siła elektromotoryczna wynikająca ze zmian w czasie strumienia magnetycznego sprzężonego z uzwojeniem twornika siła elektromotoryczna wynikająca z ruchu zwojów uzwojenia twornika względem jakiegoś strumienia magnetycznego 2. Zależności wiążące:
Dla uzwojenia twornika: z warunku pracy na liniowej części charakterystyki magnesowania: z warunku utrzymywania stałej wartości prądu wzbudzenia
Dla uzwojenia twornika: Ψt - strumień magnetyczny skojarzony z uzwojeniem twornika z warunku pracy na liniowej części charakterystyki magnesowania:
Ostatecznie: Podstawienia – wykorzystanie założeń i zależności wiążących:
Model matematyczny – część elektryczna – obwód twornika: Równanie różniczkowe: lub: z warunkiem początkowym:
Obiekt dynamiczny Prawo przekształcenia u(t) w y(t) Model matematyczny – silnik p.s.: Graficzne zobrazowanie: Przykład 5: Struktura modelu Model przestrzeni stanu
(1) (2) (3) Model matematyczny – silnik p.s.- eliminacja it: Przykład 6: Różniczkowanie (1):
(4) Podstawienie z (1) do (4) Podstawienie z (2) do (3) (5)
Porządkowanie (5): Ostatecznie: Model wejście - wyjście
Obiekt dynamiczny Prawo przekształcenia u(t) w y(t) Model matematyczny – silnik p.s.: Graficzne zobrazowanie: Przykład 6: Struktura modelu
Przykład 7: Usunięcie założenia o nieznaczącej wartości momentu oporowego zewnętrznego: Model matematyczny – część mechaniczna:
Obiekt dynamiczny prawo przekształcenia u(t) w y(t) Model matematyczny – silnik p.s.: Graficzne zobrazowanie: Przykład 6: Struktura modelu
Praca własna: czy można z modelu silnika p.s. z przykładu 6 wyeliminować it? Dalsze przykłady modeli obiektów/systemów dynamicznych Ćwiczenia – w tym semestrze i laboratorium – w przyszłym semestrze