Download
1 / 29
330 likes | 841 Views
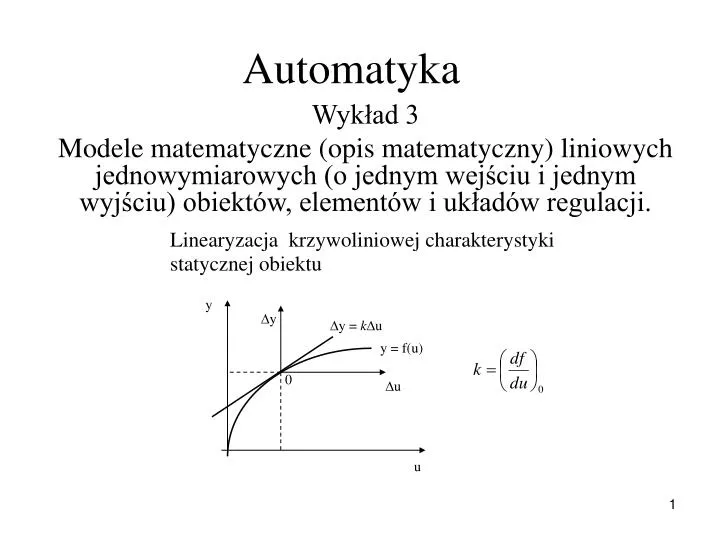
y. y. y = k u. y = f(u). 0. u. u. Automatyka. Wykład 3 Modele matematyczne (opis matematyczny) liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów regulacji. y ( t ). u ( t ). Obiekt. Równanie wejścia – wyjścia

E N D
y y y = ku y = f(u) 0 u u Automatyka Wykład 3 Modele matematyczne (opis matematyczny) liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów regulacji.
y(t) u(t) Obiekt • Równanie wejścia – wyjścia • Transmitancja operatorowa i widmowa • Równania stanu i równanie wyjścia
Równanie wejścia – wyjścia określa związek zachodzący między sygnałem wejściowym u(t) obiektu a jego sygnałem wyjściowym y(t) i wynika z prawa równowagi dynamicznej ( prawo Newtona, prawa Kirchchoffa itd.) Transmitancję operatorową uzyskuje się z równania wejścia - wyjścia po jego przekształceniu wg. Laplace’a. Transmitancja widmowa opisuje obiekt w dziedzinie częstotliwości. Ma istotne znaczenie dla sygnałów sinusoidalnych. Równania stanu uzyskuje się z równania wejścia – wyjścia. Stan obiektu w każdej chwili określają zmienne stanu związane z magazynami energii występującymi w obiekcie. Równanie wyjścia określa zależność sygnału wyjściowego y(t) od zmiennych stanu x1(t), x2(t), … .
Równanie wejścia – wyjścia obiektu (1) Transmitancja operatorowa obiektu Zakładając zerowe warunki początkowe i przekształcając równanie (1) wg. Laplace’a otrzymujemy (2) (3) (4)
Równania stanu i równanie wyjścia Równania stanu Równanie wyjścia
Zapis wektorowo-macierzowy równań stanu i równania wyjścia • równanie stanu • równanie wyjścia - wektor stanu o składowych - sygnał sterujący (sterowanie) A– macierz obiektu o wymiarach b – macierz kolumnowa wejścia o wymiarach n x 1 - sygnał wyjściowy (odpowiedź) cT– macierz wyjścia o wymiarach
y(t) = cTx(t) x(t) u(t) bu b cT Ax x A Wyznaczanie transmitancji operatorowej na podstawie równania stanu i równania wyjścia • równanie stanu • równanie wyjścia Schemat blokowy zmiennych stanu
- równanie stanu - równanie wyjścia
y t y 0 t Obiekty regulacji • Obiekty statyczne: inercyjne i oscylacyjne 2. Obiekty astatyczne (całkujące)
Obiekt inercyjny pierwszego rzędu Równanie wejścia – wyjścia: T – stała czasowa, k - wzmocnienie Transmitancja operatorowa: Transmitancja widmowa: Obiekty inercyjne Obiekty statyczne
Równanie stanu: Równanie wyjścia:
R i(t) i(t) uwe(t) uwy(t) C Czwórnik RC jako przykład obiektu inercyjnego I rzędu • Równanie wejścia – wyjścia: • Transmitancja operatorowa:
Transmitancja widmowa: • Równanie stanu: zmienna stanu
Obiekt inercyjny drugiego rzędu Równanie wejścia – wyjścia: Transmitancja operatorowa:
R1 R2 i2 i(t) i1 i2 u1 C2 C1 uwy(t) uwe(t) Podwójny czwórnik RC jako przykład obiektu inercyjnego II rzędu • Równanie wejścia – wyjścia: Na podstawie praw Kirchhoffa mamy Zatem: .
Transmitancja operatorowa: • Transmitancja widmowa:
Równania stanu: Zmienne stanu:
R1 R2 i1(t) i2(t) i1(t) i2(t) Wzmacniacz separujący uwe(t) uwy(t) C1 C2 Obiekt dwuinercyjny Obiekt inercyjny z opóźnieniem Równanie wejścia – wyjścia: Transmitancja operatorowa:
Obiekt oscylacyjny II rzędu Równanie wejścia – wyjścia: n - pulsacja drgań nietłumionych, - współczynnik tłumienia. Transmitancja operatorowa:
Równania stanu: Zmienne stanu: równania stanu Równanie wyjścia:
R L i(t) i(t) uwe(t) uwy(t) C Przykład:
R L i(t) i(t) uwe(t) uwy(t) C Równania stanu i równanie wyjścia czwórnika RLC Zmiennymi stanu są: równania stanu Równanie wyjścia:
Wyznaczanie transmitancji operatorowej na podstawie równań stanu i równania wyjścia - równanie stanu - równanie wyjścia