Download
1 / 7
70 likes | 232 Views
Make your data with Kinect. 2011. May. 24 Jiseob Kim, Eun -Sol Kim. rosbag. Tools for recording from and playing back to ROS topics Recording from topics Record all topics Play back contents There are many options which can help your project2 http://www.ros.org/wiki/rosbag/Commandline.

E N D
Make your data with Kinect 2011. May. 24 Jiseob Kim, Eun-Sol Kim
rosbag • Tools for recording from and playing back to ROS topics • Recording from topics • Record all topics • Play back contents • There are many options which can help your project2 • http://www.ros.org/wiki/rosbag/Commandline rosbag record rosouttf cmd_vel rosbag record -a rosbag play <my_file.bag> rosbag -h
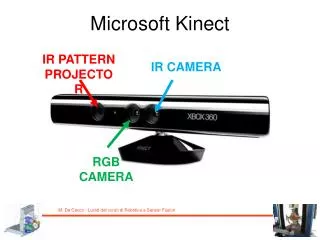
Practice for project2 • Make your data • Project2 Track A: Image data • Project2 Track B: Motion data • You should use the Kinect for data capture • You should use ‘rosbag’
Make an Image Dataset • Take a picture with Kinect • Change • color image to gray scale image • image size: 20ⅹ20 • One image has 400 feature values
Make a Motion Dataset • Start openni_tracker • Record human motions from Kinect • record ‘tf’ and ‘camera/rgb’ • Features for motion dataset • 15 joint angles • Each joint has 4 angle values (x,y,z,w) • rotation values not a translation • One motion has 60 feature values • Tips • Use ‘echo’ and ‘redirection’ to change the recordingfile format (ex. .bag-> .txt) • Because .bag is difficult to deal with other text editor
Make an .arff file @RELATION <dataset name> @ATTRIBUTE <feature1 name> <feature1 type> @ATTRIBUTE <feature2 name> <feature2 type> @ATTRIBUTE <feature3 name> <feature3 type> @ATTRIBUTE <feature4 name> <feature4 type> ….. @ATTRIBUTE class <classes name> @DATA 1,2,3,1, apple 3,2,0,1, book …… Header Data ( feature values + class )
Schedule for project2 • May. 29 • TA will give you kinect and Linux machine • Specification document for project 2 will be uploaded • (Jun. 5: Final Exam) • Jun. 12 • Poster presentation • Jun. 14 • Deadline of a report for project2