Download
1 / 43
440 likes | 620 Views
Mechatronics Honours Project 2006. Robofiddler. Robotic Violin Player Project No. 395. Team Members: Boon Yao Hong, Joshua Chia, Chin Hooi Lee, Beinjy Lim Supervisor: Dr. Frank Wornle. Introduction Background Project Goals Design overview Bowing mechanism Fingering mechanism.

E N D
Mechatronics Honours Project 2006 Robofiddler Robotic Violin PlayerProject No. 395 Team Members: Boon Yao Hong, Joshua Chia, Chin Hooi Lee, Beinjy Lim Supervisor: Dr. Frank Wornle
Introduction Background Project Goals Design overview Bowing mechanism Fingering mechanism Control system overview Summary Conclusion Questions Seminar Outline
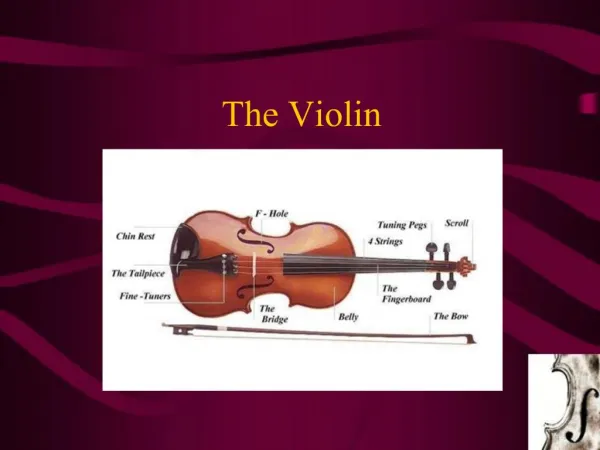
Background – The Violin • Smallest and highest pitch bowed string musical instrument • Four strings G, D, A, E • Right hand bowing • Left hand fingering • Human intelligence and expression • Various bowing styles • Vibrato – pitch of note varies in pulsating rhythm Audio sample of violin sound
Background – The Violin (Wikipedia 2006) (Wikipedia 2006)
Background – The Violin (Menuhin et al. 1976) (Menuhin et al. 1976)
Background • Gulbransen Virtuoso Violin (QRS Music Technologies 2005) • “KANSEI” violin playing robot by Shibuya Labs of Ryukoku University (Shibuya Lab. 2006)
Background (Beyond Tomorrow 2006)
Project Goals • Design and build a robotic system capable of playing the violin to a given set of musical notes. • Mechanical bowing system • Mechanical fingering system • Control system
Major aspects Movements Motors selection Motors placement Material used Pulleys Gears Frame Mechanical design of bowing arm
3 degree of freedom required • Lifting motion (Rotational motion) • Tilting motion (Rotational motion) • Bowing motion (linear motion)
Motors • DC motor (Bowing) • 4.5V – 15V • Gearbox combination (50:1) • Torque – 362.5 (mNm) • Speed – 252 (R.P.M) • Weight – 156 (g) • Size – 32.5 x 90 x 30 (mm³) • Required torque – 87.5 (mNm) • Required speed – 239 (R.P.M)
Motors • Servo Motor x2 • 4.8 – 6V • Torque – 1000(mNm) • Speed – 0.2sec / 60deg • Weight – 10 (g) • Size - 54.4 x 26.5 x 51.5mm (L x W x H) Required Torque – 700 (mNm) Required Speed – 0.63sec / 60deg
Motors placement • All motors are closely arranged. • Wiring • Ease of isolating noise • Motors are placed at one end of a pivot point • Reduce load of servo motor (lifting motion)
Pulley • Center of string is screwed onto the pulley to prevent slip while the pulley turns • String is spooled on in both clockwise and anti-clockwise direction.
Gears • Additional torque • Gear ratio – 1:3 • Torque – 3 times larger • Provide clearance • Sufficient space to mount DC motor and Servo motor
Frame • Adjustable • Portable • Made of Aluminium
Mechanical design of fingering system • Overall function outlines • Analysis of design • Motor selection
Overall function outlines • Distributes pressure evenly • Latch and release fingering actuation • Positioning of fingering • Control of system actuation
Analysis of design • Latch and release mechanism • Bracket supports the neck of the violin • Lever bar pushes the fingering bar vertically downwards • Spring returns the fingering bar to its initial position Fingering bar Lever Rubber Spring
Analysis of design • Positioning of the fingering mechanism • Guiding rods • Grub screws
Motor selection • Linear solenoid, pneumatic actuation solenoid and stepper motor are considered • M42SP-5 Stepper motors (18V) • Holding torque - 94.1mNm • Step angle – 7.5º/step • Coil DC resistance - 100Ω/phase ±7% • Max pull-out pulse rate – 445pps • Max pull-in pulse rate – 435pps
Control System of the Bowing Motion • The bow should be able to follow prescribed velocity profiles thereby allowing the violin system to play at different timings, tempos and rests
Control System of the Tilting and Lifting Motion • Servo motors are controlled by Pulse-width Modulation (PWM) • Duty cycles correspond to the angle of the servo motor
Control System of the Fingering Motion • Stepper motor is programmed to turn in clockwise and anti-clockwise directions • Clockwise motion to press and latch the finger onto the strings • Anti-clockwise motion to release the finger to original position
Control System of the Fingering Motion Pulses Gate Direction pin Trigger
Teaching the System to Play Music • Involves 2 steps • Find parameters of the bowing and fingering mechanism to play each music note • Assign those parameters to each music note e.g. C#=T36 L26 B2 F3 • T36 = tilting at the angle of 36 degrees • L26 = lifting at the angle of 26 degrees • B2 = bowing speed • F3 = finger No3 is activated
Playing the Music • Send a series of music notes to the micro controller • e.g C # DAGF#
Current Work • Successful in achieving: • Effective and cost efficient design • The parameters of the bowing mechanism to play each string Future Work • Aims yet to achieve: • Further programming for the fingering actuation • An algorithm that can read a series of musical notes and the robot could run accordingly
Extended goals • Digital signal processing • Generate vibrato • Expression and sensitivity
Conclusion • Robotic system capable of playing the violin • 3 main systems • Achieve majority of fundamental goals for project
Acknowledgements • Dr. Frank Wornle • Project Supervisor • Mr. Silvio De Ieso • Electronics and Instrumentation • Mr. George Osborne • Mechanical Design
List of references • Beyond Tomorrow 2006, Pianola Violin, Australia, viewed 4th September 2006, http://www.beyondtomorrow.com.au/stories/ep30/pianola.html • Menuhin, Y, Primrose, W & Stevens, D 1976, Violin and Viola, MacDonald and Jane’s, London. • QRS Music 2005, The Virtuoso Violin, USA, viewed 4th September 2006, http://www.qrsmusic.com/pianomation/violin.htm • Shibuya Laboratory 2006, Violin Playing Robot, Japan, viewed 4th September 2006, http://mec3342.mecsys.ryukoku.ac.jp/sibuya/index.htm • Wikipedia Free Encyclopedia 2006, Violin, California, viewed 4th September 2006, http://en.wikipedia.org/wiki/Violin • Shibuya Laboratory 2006, Violin Playing Robot, Japan, viewed 4th September 2006, http://mec3342.mecsys.ryukoku.ac.jp/sibuya/index.htm