Download
1 / 1
50 likes | 392 Views
Dual Stewart Platform Mobility Simulator.

E N D
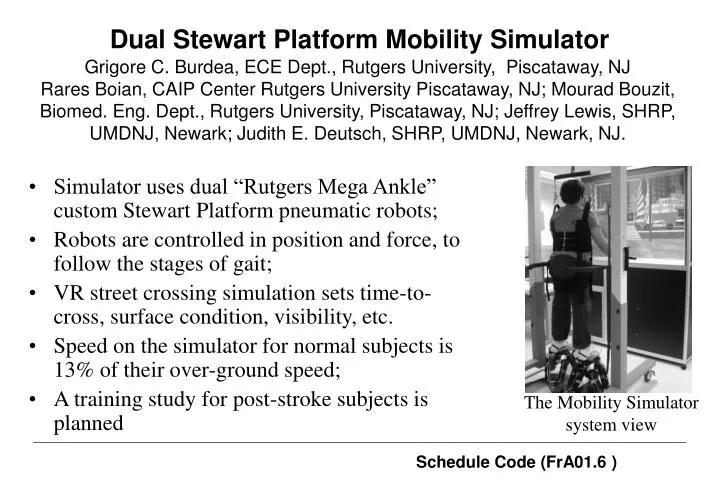
Dual Stewart Platform Mobility Simulator Grigore C. Burdea, ECE Dept., Rutgers University, Piscataway, NJRares Boian, CAIP Center Rutgers University Piscataway, NJ; Mourad Bouzit, Biomed. Eng. Dept., Rutgers University, Piscataway, NJ; Jeffrey Lewis, SHRP, UMDNJ, Newark; Judith E. Deutsch, SHRP, UMDNJ, Newark, NJ. • Simulator uses dual “Rutgers Mega Ankle” custom Stewart Platform pneumatic robots; • Robots are controlled in position and force, to follow the stages of gait; • VR street crossing simulation sets time-to-cross, surface condition, visibility, etc. • Speed on the simulator for normal subjects is 13% of their over-ground speed; • A training study for post-stroke subjects is planned The Mobility Simulator system view Schedule Code (FrA01.6 )