Download
1 / 8
80 likes | 183 Views
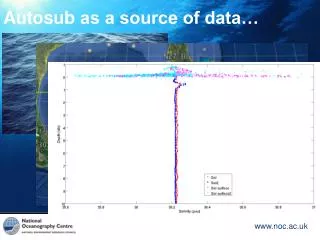
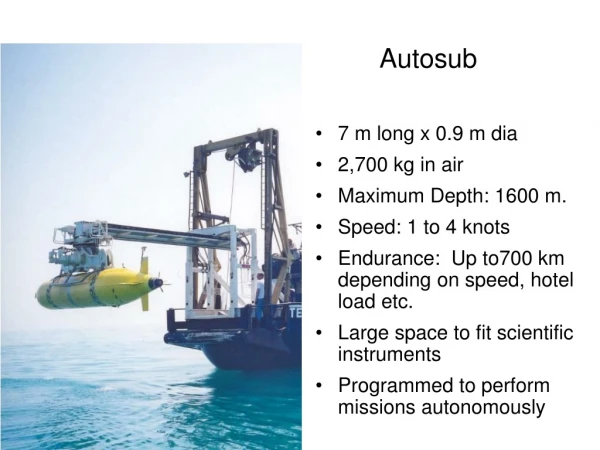
Autosub Electronics and Data Processing. James Perrett Ocean Engineering Division Southampton Oceanography Centre James.Perrett@soc.soton.ac.uk. Overview. The Electrical/Electronic Architecture Distributed Software Architecture Data Logging and Processing. Power System.

E N D
Autosub Electronics and Data Processing James Perrett Ocean Engineering Division Southampton Oceanography Centre James.Perrett@soc.soton.ac.uk
Overview • The Electrical/Electronic Architecture • Distributed Software Architecture • Data Logging and Processing
Power System • Manganese Alkaline - 96V Nominal • Individual battery currents continuously monitored • Motor runs at raw battery voltage • All other systems on 48V or 24V bus • Most sub systems electrically isolated
Wiring Harness • One cable carries all connections required by most sub systems • LONWorks data network • 48V Power Supply • 24V Power Supply
Electronic Hardware • Standard Types • Analogue I/O node • Serial I/O node • LTM 10 (Flash programmable) node • Router • HPSN based node • Specials • Data logger (PC104 based)
Network Configuration - Binding network output int nvo_1 network input int nvi_2 network input int nvi_3 network output int nvo_4
Data Logger • Event Driven • Variables are recorded as they arrive • Scheduled • Variables are polled at regular intervals • Output variables sent to telemetry systems • Files opened, closed and renamed. • Diagnostic Mode • Data sent to serial port. • Ethernet Network File Server
Background - Possible Changes • Reduce wiring harness complexity by standardising on 48V • Add ethernet to harness.