Download
1 / 5
50 likes | 180 Views
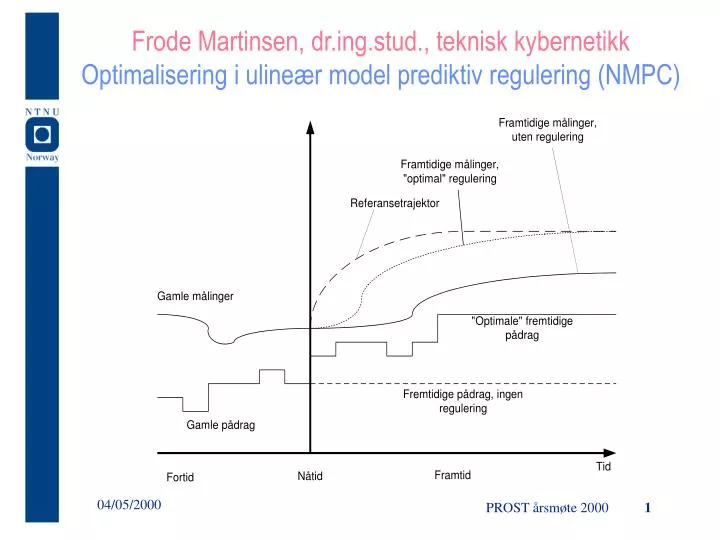
Frode Martinsen, dr.ing.stud., teknisk kybernetikk Optimalisering i ulineær model prediktiv regulering (NMPC). Optimalisering. Ulineær MPC blir et ulineært optimaliseringsproblem ( NLP ) pga. ulineær modell:

E N D
Frode Martinsen, dr.ing.stud., teknisk kybernetikkOptimalisering i ulineær model prediktiv regulering (NMPC) 04/05/2000
Optimalisering • Ulineær MPC blir et ulineært optimaliseringsproblem (NLP) pga. ulineær modell: • Løses vha. sekvensiell kvadratisk programmering (SQP) dvs. en sekvens av kvadratiske delproblemer dannet ved linearisering • “Feasibility” av løsningene for alle problemene i sekvensen gjør at vi kan avbryte før den optimale løsningen er funnet; dvs. vi nøyer oss med å finne en “litt” bedre løsning • Algoritmer: FSQP (Tits) og sekvensiell metode (Biegler); dvs. standard SQP-algoritmer kan ikke brukes uten videre • Hva skjer om man bruker “infeasible” algoritmer? (Dvs. at modellen ikke er oppfylt) 04/05/2000
Eksempel: diskretisert CSTRulineær MPC 04/05/2000
Eksempel: diskretisert CSTRulineær MPC 04/05/2000
Eksempel: diskretisert CSTRlineær MPC 04/05/2000