Download
1 / 46
470 likes | 887 Views
Harmonic rejection strategies for grid converters. Marco Liserre liserre@poliba.it. Outline. Introduction Resonant and repetitive controllers Models of the non-linear filter: average, picewised, volterra Experimental results Conclusions.

E N D
Harmonic rejection strategies for grid converters Marco Liserre liserre@poliba.it
Outline • Introduction • Resonant and repetitive controllers • Models of the non-linear filter: average, picewised, volterra • Experimental results • Conclusions
New power quality standards for distributed power generation (IEEE 1547 and IEC 61727) calls for better current control Introduction • Packaging and cost issues leads to the choice of small grid inductors • Inductors are often working near to saturation • In case of saturation the predicted behaviour of current controllers is not valid anymore single-phase distributed generation PV system with non-linear filtering inductance
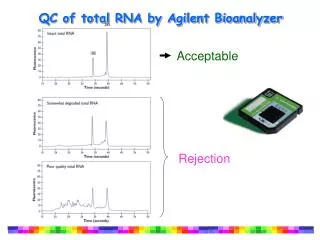
Introduction: harmonic limits for PV inverters • In Europe there is the standard IEC 61727 • In US there is the recommendation IEEE 929 • the recommendation IEEE 1547 is valid for all distributed resources technologies with aggregate capacity of 10 MVA or less at the point of common coupling interconnected with electrical power systems at typical primary and/or secondary distribution voltages • All of them impose the following conditions regarding grid current harmonic content • The total THD of the grid current should not be higher than 5%
Introduction: harmonic limits for WT inverters • In Europe the standard 61400-21 recommends to apply the standard 61000-3-6 valid for polluting loads requiring the current THD smaller than 6-8 % depending on the type of network. • in case of several WT systems • in WT systems asynchronous and synchronous generators directly connected to the grid have no limitations respect to current harmonics
Harmonic compensation • The decomposition of signals into harmonics with the aim of monitor and control them is a matter of interest for various electric and electronic systems • There have been many efforts to scientifically approach typical problems (e.g. faults, unbalance, low frequency EMI) in power systems (power generation, conversion and transmission) through the harmonic analysis • The use of Multiple Synchronous Reference Frames (MSRFs), early proposed for the study of induction machines, allows compensating selected harmonic components in case of two-phase motors, unbalance machines or in grid connected systems
Harmonic compensation • The harmonic components of power signals can be represented in stationary or synchronous frames using phasors • In case of synchronous reference frames each harmonic component is transformed into a dc component (frequency shifting) • If other harmonics are contained in the input signal, the dc output will be disturbed by a ripple that can be easily filtered out. REF R. Teodorescu, F. Blaabjerg, M. Liserre and P. Chiang Loh, “A New Breed of Proportional-Resonant Controllers and Filters for Grid-Connected Voltage-Source Converters” IEE proceedings on Electric Power Applications, September 2006, Vol. 153, No. 5, pp. 750-762.
Harmonic compensation by means of synchronous dq-frames • two controllers should be implemented in two frames rotating at -5 and 7 • or nested frames can be used i.e. implementing in the main synchronous frame two controllers in two frames rotating at 6 and -6 • Both solutions are equivalent also in terms of implementation burden because in both the cases two controllers are needed
Harmonic compensation by means of stationary ab-frame Besides single frequency compensation (obtained with the generalized integrator tuned at the grid frequency), selective harmonic compensation can also be achieved by cascading several resonant blocks tuned to resonate at the desired low-order harmonic frequencies to be compensated. As an example, the transfer functions of a non-ideal harmonic compensator (HC) designed to compensate for the 3rd, 5th and 7th harmonics is reported
Resonant Controllers only changing the parameters of the controllers PM
650 Hz bandwidth stability margin 72° Resonant Controllers 1 2 3 • Open loop Bode diagram • Closed loop Bode diagram • Disturbance rejection
Harmonic compensation by means of stationary ab-frame Open-loop PR current control system with and without harmonic compensator Closed loop PR current control system with and without harmonic compensator • Having added the harmonic compensator, the open-loop and closed-loop bode graphs changes as it can be observed with dashed line. The change consists in the appearance of gain peaks at the harmonic frequencies, but what is interesting to notice is that the dynamics of the controller, in terms of bandwidth and stability marginremains unaltered.
Hybrid solution: generalized integrator in dq frame Instead of using two nested frames rotating at 6 and -6 in the main synchronous frame one resonant controller can be used REF M. Liserre, F. Blaabjerg, R. Teodorescu, “Multiple harmonics control for three-phase systems with the use of PI-RES current controller in a rotating frame” IEEE Transactions on Power Electronics, May 2006, vol. 21, no. 3, pp. 836-841.
Hybrid solution: generalized integrator in dq frame cause: 5th inverse 7th direct Three different harmonic controllers are applied at t=0.5 in three different simulations: 1 use of a standard integrator in a frame rotating at 6w; 2 use of two standard integrators implemented in two frames rotating at 6w and -6w; 3 use of a 6th harmonic resonant controller Further compensation due to unfiltered synchronization signal
Disturbance rejection comparison Disturbance rejection (current error ratio disturbance) of the PR+HC, PR and P • Around the 5th and 7th harmonics the PR attenuation being around 125 dB and the PI attenuation only 8 dB. The PI rejection capability at 5th and 7th harmonic is comparable with that one of a simple proportional controller, the integral action being irrelevant • PR +HC exhibits high performance harmonic rejections leading to very low current THD!
Repetitive current control • The repetitive controller is able to track any periodic signal of period T1 and it corresponds to • A delay of duration T1 in feedback control loop results in the placements of an infinite number of poles at and at all their multiples so that any periodic disturbance of period T1can be rejected. • The repetitive controller transfer function is implemented as an N-samples delay closed in feedback • is the number of samples in a fundamental period T1 and T is the sample time. repetitive controller
Repetitive current control • Gc(s) is a PI controller designed to ensure that the dynamic of the inner loop has a damping factor of 0.707; • Despite the careful design of Gc(s) the stability is the main issue of this control method; • The repetitive controller amplifies infinite high-order harmonics while the system to be controlled as a limited bandwidth.
Repetitive current control • A different solution based on a FIR filter can be chosen: • The FIR generates the grid harmonic disturbance and it does not lead to instability since it amplifies only Nhharmonics
FDFT + + Repetitive current control • The FIR filter employed in positive feedback positive loop summarizes a set of resonant filters
Results: grid voltage background distortion Effect of the grid voltage background distortion on the currents Use of harmonic compensators
Results: grid voltage background distortion Effect of the grid voltage background distortion on the currents Use of harmonic compensators
Resonant and Repetitive Controllers • Resonant control • Repetitive control based on DFT
Resonant and Repetitive Controllers Open-loop Bode plot of the system with the proposed current controllers: (a) resonant controller; (b) FIR repetitive-based controller. • The difference between resonant and repetitive controllers in normal conditions (linear behaviour of the inductor) is very small (0.9 % in terms of THD). • The use of DFT with the running window gives a small advantage to the repetitive controller. • The repetitive controller exhibits better performances than the resonant one in the rejection of the fifth and the seventh harmonics
Average inductor model • The describing function method has been widely used to determine the dynamic behaviour of nonlinear systems. The describing functions method can be used to linearise the nonlinear characteristic of the inductor and estimate the average inductance value where the interval of integration T can be chosen to be one period of the ac input current and δ is the portion of fundamental period (expressed in p.u.) for which the inductance has value Lsat REF S.C. Chung, S.R. Huang and E.C. Lee, “Applications of describing functions to estimate the performance of nonlinear inductance”, IEE Proceedings-Science, Measurement and Technology, vol.48, no. 3, May 2001, pp.108-114.
Average inductor model Grid current (reference, actual and error) with resonant controller in case of increment of saturation from δ=0.25 to δ=0.33. Real and imaginary part of the closed loop of the PWM inverter system (with PI current controller) for variations of the degree of filtering inductance saturation from δ=0 to δ=0.4. saturation -> instability
Piecewise linearizated inductor model • A time-variant current dependent model can be developed on the basis of the piecewise linearization. • Two different cases of nonlinearities are considered: the saturation of the inductor, which occurs for high values of current, and a light nonlinearity of the first portion of the magnetization curve which occurs for very low value of current.
Piecewise linearizated inductor model resonant repetitive
Volterra-series expansion inductor model • The frequency behaviour of the non-linear inductance can be studied splitting the model in a linear part and a non-linear part in accordance with the Volterra theory. The Volterra-series expansion of the flux is is the first order response of the inductor which describes the behaviour in the linear case is the non-linear response of the inductor obtained using an appropriate excitation which is function of the lower order excitation
Volterra-series expansion inductor model implementation of the non-linear inductance model • The Volterra model allows calculating harmonics which are introduced in the systems as effect of the filter inductance saturation • These harmonics can be modelled as external disturbances, hence they can be compensated by the resonant and repetitive controllers similarly to grid voltage harmonics • This explains theoretically the effectiveness of the resonant and repetitive controllers in case of non-linear inductance
Volterra-series expansion inductor model • ii(t) through the non-linear inductor acts as an external source exciting the linear circuit • it can be represented as an external source of current which is connected to the system between the converter and the grid
Volterra-series expansion inductor model input current at ω1= 50 Hz input current at ω2= 150 Hz input current at (ω1 + ω2 ) flux spectrum of the non-linear inductance • When two sinusoids of different frequencies are applied simultaneously intermodulation components are generated • They increase the frequency components in the response of the system and the complexity of the analysis
Volterra-series expansion inductor model REF R. A. Mastromauro, M. Liserre, A. Dell'Aquila, Study of the Effects of Inductor Non-Linear Behavior on the Performance of Current Controllers for Single-Phase PV Grid Converter, IEEE Transactions on Industrial Electronics, VOL. 55, NO. 5, MAY 2008. J. J. Bussagang, L. Ehrman, J. W. Graham, “Analysis of Nonlinear Systems with Multiple Inputs”, Proceedings of the IEEE, vol. 62, no. 8, Aug. 1974, pp.1088-1119. F. Yuan, A. Opal, “Distortion Analysis of Periodically switched Nonlinear circuits Using time-Varying Volterra Series” IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Applications, vol.48, no. 6, June 2001, pp.726-738. E. Van Den Eijnde, J. Schoukens, “Steady-State Analysis of a Periodically Excited Nonlinear System”, IEEE Transactions on Circuits and Systems, vol.37, no. 2, Feb. 1990, pp.232-241.
Inductors classification FERRITE CORE POWDERED METAL CORE • energy is stored in a distributed non- • magnetic gap • energy is stored in a discrete gap in • series • are feasible because of higher saturation • in case of low switching frequency and • low current ripple • are preferred when core losses dominate • in case of higher switching frequency • and/or current ripple toroidal inductor with powdered metal core air-gap based inductor with ferrite core
Simulation results: high values of currents RESONANT CONTROL grid current response grid current harmonic spectrum
Simulation results: high values of currents REPETITIVE CONTROL BASED ON DFT grid current response grid current harmonic spectrum
Simulation results: light non-linearities for low values of the current RESONANT CONTROL grid current response grid current harmonic spectrum
Simulation results: light non-linearities for low values of the current REPETITIVE CONTROL BASED ON DFT grid current response grid current harmonic spectrum
Experimental Setup: Polytechnic of Bari DSpace 1104 inverter Dc power supplies filtering inductance power analyzer RLC load
Experimental results Three different kind of of single-phase filtering inductance have been tested: • 3 mH and 1.5 mH toroidal inductor with a powdered metal core • a 2.6 mH air-gap based inductor with a ferrite core For low currents the air-gap based inductor characteristic is more non-linear • a – 3 mH toroidal inductor characteristic • b – 2.6 mH air-gap inductor characteristic • c – 1.5 mH toroidal inductor characteristic
Experimental results: inductors characterization voltage drop of toroidal inductor voltage drop of air-gap based inductor THE VOLTAGE THD CAUSED BY THE TOROIDAL INDUCTOR IS LOWER
Experimental results: low current non-linearity repetitive controller resonant controller a a THD= 3.9% THD= 4.8% b b Grid current with air-gap based inductor and repetitive controller: a) (1) grid current [10A/div]; (2) grid voltage [400V/div]; (A) grid voltage spectrum [10V/div]; (B) grid current spectrum [0.5A/div]; (C) a period of the grid voltage; (D) a period of the grid current; b) a period of the grid current (simulation results) [10A/div]. Grid current with air-gap based inductor and resonant controller: a) (1) grid current [10A/div]; (2) grid voltage [400V/div]; (A) grid voltage spectrum [10V/div]; (B) grid current spectrum [0.5A/div]; (C) a period of the grid voltage; (D) a period of the grid current; b) a period of the grid current (simulation results) [10A/div].
Experimental results: high current non-linearity repetitive controller resonant controller a a THD= 4.9% THD= 8.1% b b Grid current with non-linear inductor and repetitive controller: a) (1) grid current [10A/div]; (2) grid voltage [400V/div]; (A) grid voltage spectrum [10V/div]; (B) grid current spectrum [0.5A/div]; (C) a period of the grid voltage; (D) a period of the grid current; b) a period of the grid current (simulation results) [10A/div]. Grid current with non-linear inductor and resonant controller: a) (1) grid current [10A/div]; (2) grid voltage [400V/div]; (A) grid voltage spectrum [10V/div]; (B) grid current spectrum [0.5A/div]; (C) a period of the grid voltage; (D) a period of the grid current; b) a period of the grid current (simulation results) [10A/div].
Experimental results • The repetitive controller exhibits better performances than the resonant controller in the rejection of the 5th and the 7th harmonic • When the system is supplied with a distorted grid voltage, intermodulation harmonics are caused by the inductor saturation, hence the repetitive controller can mitigate also the 9th, 11th, 13th harmonics (caused by intermodulation between the 1st and the 5th and between the 1st and the 7th)
Conclusions The effects of non-linear inductance on the performance of current controllers have been investigated with a frequency-domain model Resonant and repetitive controllershave been tested in case of a non-linear plant A current-dependent model of the non-linear inductance has been developed using the Volterra series expansions The model allows proving how harmonic compensation provided by resonant and repetitive controllers can also mitigate the effects of the inductance saturation. • to compensate grid voltage harmonics • to compensate odd harmonics caused by plant non-linearity The proposed controllers are able: The repetitive controller is able to comply with the harmonic limits reported in IEEE 1547 and IEC 61727 even in very hard saturation conditions
Conclusions In case of high-current saturation, the repetitive controller exhibits better performances in fact it reduces the fifth and the seventh harmonics more than the resonant one. For this reason the repetitive controller provides better performances also in correspondence to the ninth, the eleventh and the thirteenth harmonics since these harmonics are created as a consequence of the intermodulation effect between the first and the fifth harmonics and between the first and the seventh harmonics. The repetitive controller is able to comply with the harmonic limits reported in IEEE 1547 and IEC 61727 even in very hard saturation conditions.