Download
1 / 33
330 likes | 342 Views
This research investigates methods to constrain the origin, orientation, and scale of a daily/weekly Terrestrial Reference Frame (TRF) without perturbing the loading signal. Synthetic and real data are used to evaluate different strategies for improving the fit to a loading model. Recommendations for estimating transformation parameters are provided to achieve better agreement between GPS data and loading models.

E N D
How to constrain the origin, orientation and scale of a daily/weekly TRF without perturbing the loading signal? X. Collilieux, Z. Altamimi, T. van Dam, J. Ray
Outline Goal: • INPUT : time series of GPS SINEX solutions • OUTPUT : Position time series with respect to ITRF frame. • i.e. apparent geocenter motion removed Outline: • How to constrain the origin, orientation and scale of a daily/weekly TRF without perturbing the loading signal? • Application to synthetic data. What is the best approach? • Application to Real data. Which strategy improves the fit with respect to a loading model? • Recommendations
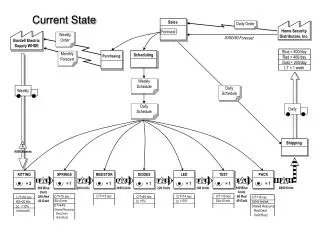
I Problem : aliasing What is loading aliasing ? Station displacements t+Δt t Estimated translation Weekly solution Apparent translation Related to displacement (Aliasing!) • 7-parameter • Transformation • translation • rotation • scale Frame definition ITRF solution
I Problem : suggestions • i) Compute the transformation parameters (translation, rotations and/or scale) over a well-distributed network of stations • ii) Downweight height. (σup ≈ 10 . σnorth). In the standard case, (σup ≈ 3 . σnorth) • iii) Use a loading model conjointly to estimate the transformation parameters (w or w/o scale). Two-step approach Input position of station i Loading displacement Estimated 7-parameters . More similar shape if the loading model is correct
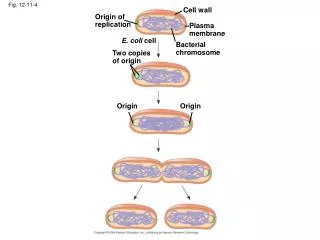
II Application to synthetic data : synthetic data Loading model • Atmopshere (6h) NCEP • Ocean (12h) ECCO • Hydrology (1 month) GLDAS Synthetic SINEX files X(t) = XITRF2008(t_0) + VITRF2008(t-t_0) + dXloading + Σdiscont + dX_spatial Ex: synthetic data GRAZ
II Application to synthetic data : results • RMS to the true value is not the right statistic to investigate network effect • since noise amplitude is higher than the aliasing effect magnitude (expect if scale is estimated) Two criteria : GPS residual synth A • Annual signal is the most relevant criteria s(t) = A cos ωt + B sin ωt Loading model A GPS residual synth B Loading model B
II Application to synthetic data : results 7-parameters Whole network – standard strategy Horizontal and height signals are badly recovered Cosinus Sinus
II Application to synthetic data : results 7-parameters Whole network estimated using the loading model If scale is estimated, the use of the loading model is the only method that could handle scale problem! Cosinus Sinus This method is of course the best with synthetic data
II Application to synthetic data : results 6-parameters Whole network (wihtout scale) Horizontal still badly recovered but height is fine Cosinus Sinus
II Application to synthetic data : results 6-parameters whole network downweighted height (σup ≈ 10 . σnorth) Better agreement in horizontal. Inphase and Outphase North term are slightly biased Cosinus Diagonal weight matrix Sinus
II Application to synthetic data : results 6-parameters whole network downweighted height (σup ≈ 10 . σnorth) Better agreement in horizontal. Outphase North term is slightly biased NB: Discrepancies increase if height is deweighted too much Cosinus Full weight matrix to Preserve correlations Sinus
II Application to synthetic data : results 6-parameters sub-network (wihtout scale) Better agreement in horizontal. Inphase North term is slightly biased Cosinus Sinus
II Application to synthetic data : results 6-parameters sub-network downweighted height (σup ≈ 5 . σnorth) Cosinus Full weight matrix to Preserve correlations Sinus
II Application to synthetic data : conclusion • If the scale factor is stable and loading effects dominate, estimating the scale degrades height positioning except if a loading model is used to model station motion • Deweighting height has a positive effect but do not deweight height too strongly. 10 factor in standard deviation is sufficient • Using correlation or not when downweighting height gives a significantly different result • A well distributed network sub-network improves drastically the fit • The network influence is negligeable here if height is downweighted with 10 factor Application to real data: • Is the scale necessary? • We retain 3 solutions to use with real data • sub-network 6 parameters • use loading model to estimate the 6 parameters • sub-network + downweighting height 6 parameters
III Application to real data Do not estimate the scale with reprocessed data? Loading model mi1 GPS reprocessed Scale factor mm gf1 co1 es1 Difference with the loading model • Cause of these variations: • Deficiency in the loading model • Draconitic period (harmonics detected in the power spectra) • Thermal effects mm Collilieux X., Métivier L., Altamimi Z., Van Dam T., Ray, J., Quality assessment of GPS reprocessed Terrestrial Reference Frame, GPS solutions, submitted
III Application to real data MI1 GPS station position annual signals vs. Loading model annual signals 6-parameters sub-network Cosinus Sinus
III Application to real data MI1 GPS station position annual signals vs. Loading model annual signals 6-paramaters loading corrections Using the loading model to estimate the 6-parameters does not seem to help improving the fit Cosinus Sinus
III Application to real data MI1 GPS station position annual signals vs. Loading model annual signals 6-paramaters sub-network downweighted height (σup ≈ 5 . σnorth) Cosinus Bias reduction With respect to the model in the in phase term But bias increase in the out phase term. Sinus Full weight matrix to Preserve correlations
IV Conclusion • Do not estimate the scale or constrain the annual signal in the scale to 0if you have checked the scale non-linear behavior beforehand A constraint to nullify scale factor annual signal can be added on the scale estimates but the whole set of TRF is managed in one run mi1 GPS solution scale factor mm Exemple : mi1 network 2) 3 solutions with similar performances • Use a uniform sub-network and estimate 6 parameters (no scale) • Use a loading model to estimate the 6 parameters (no scale) • Downweigh height (σup ≈ 5-10 . σnorth) and estimate 6 parameters 3) Differences between GPS and loading model evaluated with those best strategies have WRMS of 0.4, 0.5 and 1.5 mm in East, North and Height.
II Application to synthetic data : results Averaged East, North and height signal over the network Downweighting height with full covariance weight smooths the averaged north signal Loading model Truth 6-parameters 6-parameters subnetwork 6-parameters downweight H 10 full 6-parameters downweight H 10 diagonal
II Application to synthetic data : results Synthetic Data
III Application to real data Real Data
II Application to synthetic data : results 6-parameters Whole network (wihtout scale) Horizontal still badly recovered but height is fine Identity weight matrix
7-paramaters sub-network Horizontal signal is better restored but still height problem
II Application to synthetic data : results 6-parameters whole network downweighted height (σup ≈ 100 . σnorth) If height deweigthed, this strategy dominates with respect to the network selection
III Application to real data MI1 GPS station position annual signals vs. Loading model annual signals 6-paramaters sub-network downweighted height (10) Bias reduction With respect to the model in the in phase term But bias increase in the out phase term.
I Problem : suggestion i i) Compute the 6 or 7-parameters using a subset of stations • Selection criteria: • 80% of points in the period of data • Discontinuity period with at least 20% of points 1) First selection • Remove stations in dense areas according to repeatability, annual signal amplitude etc… • Add stations in empty area trying to fullfill as maximum as possible the first selection criteria 2) Result for GPS mi1 network:
I Problem : suggestion ii ii) Deweigh Height in the 6 or 7-parameter computation Procedure used in GLOBK sofware (Herring …) We implemented it following * Guo et al., « Robust estimation for correlated observations: two local sensivity-based downweighting strategies», JoG 2010 Goal : to preserve the correlations but by increasing uncertainty on height Varlocal = Λ. Corr .Λ σ1east σ2north σ1up σ2east σ2north σ2up .. Correlation matrix σ1east σ2north ασ1up σ2east σ2north ασ2up .. Λ= diag Varnewlocal = Λnew. Corr .Λnew Λnew= diag We use αsuch thatσup = 10 .σnorth
I Problem : suggestion iii iii) Compute the 6 or 7-parameters using a loading model to mitigate the aliasing effect Input position of station i Estimated 7-parameters Loading displacement . More similar shape if the loading model is correct • 2-step procedure: • Estimate the 6 or 7 parameters using the loading model • Apply the estimated 6 or 7 parameter transformation to input data
III Application to real data BUT if the estimation of the scale is needed, A constraint can be added to the scale estimates if the whole set of TRF is managed in one run mi1 GPS solution scale factor Exemple : mi1 sub-network mm
(mm) Potsdam U (mm) Bahrein N