Download
1 / 1
10 likes | 132 Views
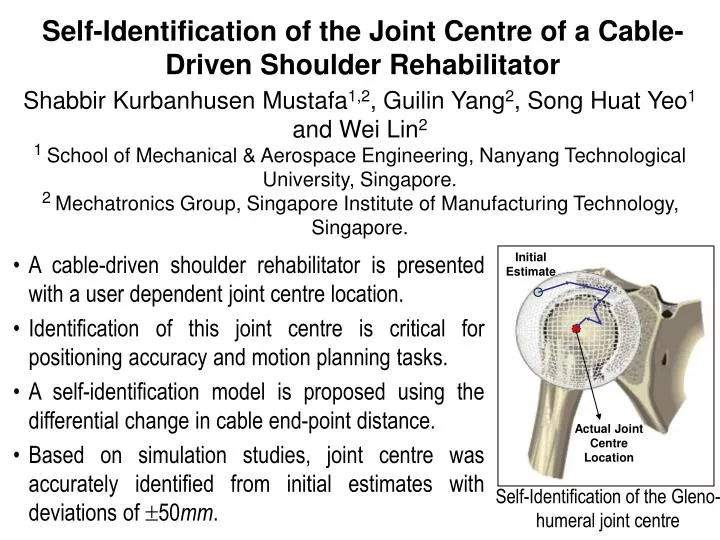
Initial Estimate. Actual Joint Centre Location. Self-Identification of the Joint Centre of a Cable-Driven Shoulder Rehabilitator.

E N D
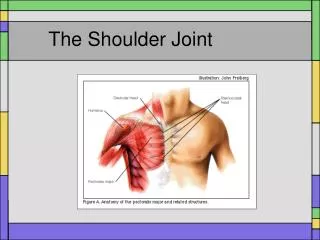
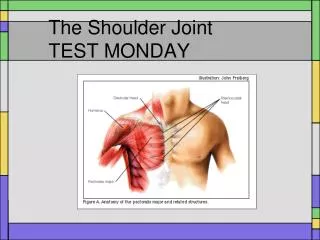
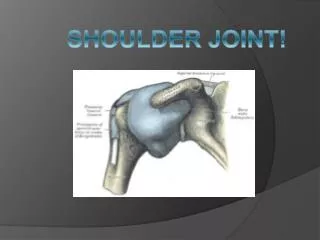
Initial Estimate Actual Joint Centre Location Self-Identification of the Joint Centre of a Cable-Driven Shoulder Rehabilitator Shabbir Kurbanhusen Mustafa1,2, Guilin Yang2, Song Huat Yeo1 and Wei Lin21 School of Mechanical & Aerospace Engineering, Nanyang Technological University, Singapore. 2 Mechatronics Group, Singapore Institute of Manufacturing Technology, Singapore. • A cable-driven shoulder rehabilitator is presented with a user dependent joint centre location. • Identification of this joint centre is critical for positioning accuracy and motion planning tasks. • A self-identification model is proposed using the differential change in cable end-point distance. • Based on simulation studies, joint centre was accurately identified from initial estimates with deviations of 50mm. Self-Identification of the Gleno-humeral joint centre