Download
1 / 12
120 likes | 237 Views
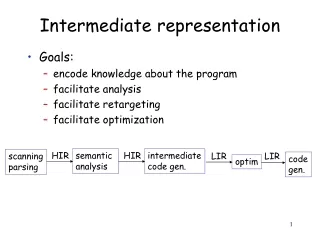
Intermediate Math. Parametric Equations Local Coordinate Systems Curvature Splines. Parametric Equations (1). We are used to seeing an equation of a curve defined by expressing one variable as a function of the other. Ex. y= f(x) Ex. y=

E N D
Intermediate Math Parametric Equations Local Coordinate Systems Curvature Splines
Parametric Equations (1) • We are used to seeing an equation of a curve defined by expressing one variable as a function of the other. • Ex. y= f(x) • Ex. y= • A parameter is a third, independent variable (for example, time). • By introducing a parameter, x and y can be expressed as a function of the parameter, as opposed to functions of each other. • Ex. F(t) = <f(t), g(t)>, where x= f(t) and y= g(t) F(t) = <cos(t), sin(t)> - what is this curve and why is this parameterization useful?
Parametric Equations (2) • Each value of the parameter t determines a point, (f(t), g(t)), and the set of all points is the graph of the curve. • Complicated curves are easily dealt with since the components f(t) and g(t) are each functions. • Ex. F(t)=<sin(3t), sin(4t)> • Sometimes the parameter can be eliminated by solving one equation (say, x=f(t)) for the parameter t and substituting this expression into the other equation y=g(t). The result will be the parametric curve.
Parametric Equations (3) • Using parametric equations, we can easily add a 3rd dimension: • A conceptual example: • Picture the xy-plane to be on the table and the z-axis coming straight up out of the table • Picture the parameterized 2-D path (cos(t), sin(t)) which is a circle on the table • Add a simple z-component such that the circle climbs off the table to form a helix (or corkscrew), z=t • Mathematically: • Add a simple linear term in the z-direction: F(t)=<cos(t), sin(t), t>
Parametric Equations (4) • The calculus we use for parametric equations is very similar to that in single-variable calculus. • As with regular curves, parametric curves are smooth if the derivatives of the components are continuous and are never simultaneously zero. • To take the derivative of a parametric equation, take the derivative of each of the components. • If F(t)=<cos(t), sin(t), t>, then F’(t)=<-sin(t), cos(t), 1> • As with single variable calculus, the 1st derivative indicates how the path changes with time. • Note that another way to represent parametric equations is to use unit vectors. From the above example: • F(t)=<cos(t), sin(t), t> turns into: F(t) = cos(t)i +sin(t)j +tk
Local Coordinate Systems (1) • A local coordinate system is a way of examining motion (in our case) at a particular instant. The tangent, normal and binormal vectors help to examine the forces riders feel at different points along a roller coaster track. These vectors are mutually perpendicular to each other and they change with time. We will be able to use them to explain why riders feel weightless at certain times and pushed into the seat at other times. • Tangent Vector – The 1st derivative of a parametric equation shows how the path is changing from one instant to the next. Another way of saying this is that it gives the instantaneous velocity. The tangent vector is found at any point by plugging in a value for the parameter to the 1st derivative. If you were sitting on a roller coaster, the tangent vector would describe your instantaneous velocity. It points directly forward (or on some roller coasters, like the boomerang, directly backwards).
Local Coordinate Systems (2) • Normal Vector – When discussing the normal vector we must be careful to consider both the normal vector (sometimes called normal force) and the mathematical definition of the normal direction. They are sometimes not the same quantity. The normal direction is defined by the curvature of the track and will be discussed in a few slides. The normal vector, however, is defined as the vector perpendicular to the tangent plane of the track. It always points straight up or down as you are sitting on the coaster car. • Binormal Vector – In the context of a roller coaster, the binormal refers to the forces acting on a person in the lateral direction. Students who have taken multivariable calculus may note that you find the direction of the binormal by crossing the tangent and normal vectors.
Local Coordinate Systems (3) • Note that how the coordinate system is defined is always important. For example, the normal vector changes its position with time for an observer watching the roller coaster and the normal is always either out of or into the track for the rider on a roller coaster. For an observer watching the roller coaster, the normal can be pointing in any direction. This is why the words local coordinate system are used. Local refers to the fact that we are examining the forces as if we were the rider sitting in the cart, not as an observer, watching the coaster from a distance.
Curvature (1) • The intuitive meaning of curvature is an adequate conceptual definition of the word for our purposes. A straight line has no curvature and a circle of a small radius is more curved than one of a large radius. It therefore makes sense that the concept of “rate of change of direction” can be applied to curvature in its definition. • Another way to look at it is by discussion of tangent circles (see picture).
Curvature (2) • However, here is the formal definition: Curvature, denoted by κ, is the absolute value of the rate of change of the angle of inclination of the tangent vector. Stated another way, it is the magnitude of the rate of change of the unit tangent vector with respect to arc length. • In equation form, if r(t)=x(t)i +y(t)j: Curvature is used as a substitute for radius, R, when applying physics formulas since curvature κ =(1/R), where R is the radius of the tangent circle • It was mentioned earlier that the normal direction is defined by curvature. While the normal force (or vector) is always perpendicular to the tangent plane to the track, the normal direction always points toward the center of curvature. It does not depend on how banked the track is. Think of a case when the normal force and the normal direction are not the same.
Splines • One way of parameterizing the path of a roller coaster is connecting different types of paths together. For example, a hill might be modeled by a parabola and a loop might be modeled by an ellipse. The connection between these two curves is very important. • A cubic spline is a spline constructed of piece-wise third-order polynomials which pass through a set of points. Where the polynomials meet, we set their 1st and 2nd derivatives equal. A continuous and smooth transition results. • Why is continuity important?