Download
1 / 30
320 likes | 484 Views
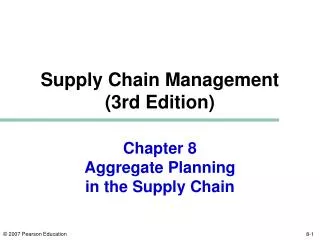
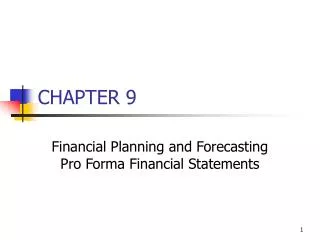
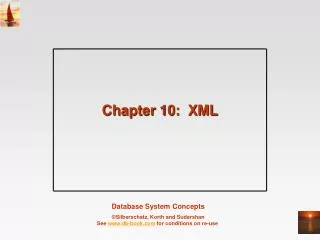
Part II Chapter 9: Topological Path Planning. Behaviors. Behaviors. Behaviors. Behaviors. Navigation. Where am I going? Mission planning What’s the best way there? Path planning Where have I been? Map making Where am I? Localization. Carto- grapher. Mission Planner. deliberative.

E N D
Part II Chapter 9:Topological Path Planning Chapter 9: Topological Path Planning
Behaviors Behaviors Behaviors Behaviors Navigation • Where am I going? Mission planning • What’s the best way there? Path planning • Where have I been? Map making • Where am I? Localization Carto- grapher Mission Planner deliberative How am I going to get there? reactive Chapter 9: Topological Path Planning
Spatial Memory • What’s the Best Way There? depends on the representation of the world • A robot’s world representation and how it is maintained over time is its spatial memory • Attention • Reasoning • Path planning • Information collection • Two forms • Route (or qualitative) • Layout (or metric) • Layout leads to Route, but not the other way Chapter 9: Topological Path Planning
Route, or Qualitative Navigation Two categories Relational spatial memory is a relational graph, also known as a topological map use graph theory to plan paths Associative spatial memory is a series of remembered viewpoints, where each viewpoint is labeled with a location good for retracing steps
Topological Maps Use Landmarks • A landmark is one or more perceptually distinctive features of interest on an object or locale of interest • Natural landmark: configuration of existing features that wasn’t put in the environment to aid with the robot’s navigation (ex. gas station on the corner) • Artificial landmark: set of features added to the environment to support navigation (ex. highway sign) • Roboticists avoid artificial landmarks! Chapter 9: Topological Path Planning
Desirable Characteristics of Landmarks • Recognizable (can see it when you need to) • Passive • Perceivable over the entire range of where the robot might need to view it • Distinctive features should be globally unique, or at least locally unique • Perceivable for the task (can extract what you need from it) • ex. can extract relative orientation and depth • ex. unambiguously points the way • Be perceivable from many different viewpoints Chapter 9: Topological Path Planning
Example Landmarks Chapter 9: Topological Path Planning
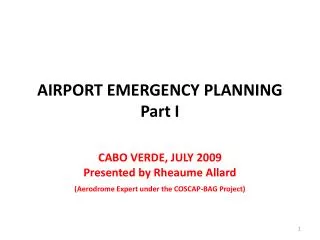
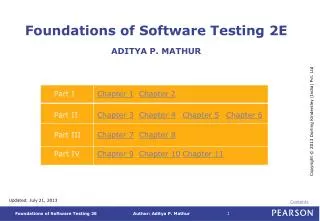
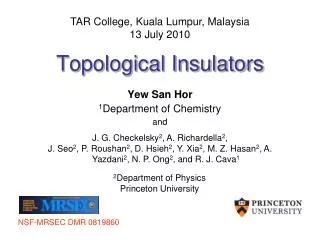
floor plan Gateway is an opportunity to change path heading relational graph Relational Methods Nodes: landmarks, gateways, goal locations Edges: navigable path
Problems with early relational graphs • Not coupled with how the robot would get there • Shaft encoder uncertainty accumulates Chapter 9: Topological Path Planning
Kuipers and Byun: Spatial Hierarchy Chapter 9: Topological Path Planning
Distinctive Place Approach Local control strategies (behaviors to get robot between DPs) Distinctive Places (recognizable, & at least locally unique) Chapter 9: Topological Path Planning
Hill climbing algorithm • Directs the robot around in the neighborhood until a measurement function indicates that the robot is at a position where the feature values are maximized • the point where it happens is the distinctive place, • the algorithm always chooses the next step which is the highest (without looking ahead) • the robot always moves in the direction which causes increase in the measurement function Chapter 9: Topological Path Planning
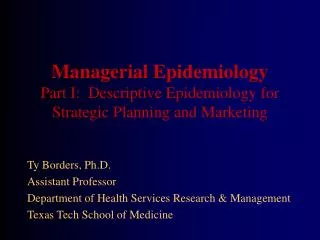
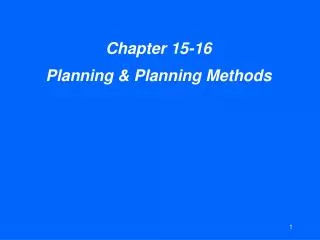
neighborhood boundary distinctive place (within the corner) path of robot as it moves into neighborhood and to the distinctive place Actually Getting to a Distinctive Place: Neighborhoods Uses one behavior until sees the DP (exteroceptive cueing) then swaps to a landmark localization behavior
Advantages and disadvantages • Distinctive place concept eliminates any navigational errors at each node • supports discovery of new landmarks as the robot explores an unknown environment • distinctive places may be hard to find • problems with perception • learning local control strategy is hard • problems with indistinguishable locations Chapter 9: Topological Path Planning
de3 r1 r2 fh mtd mtd Room 1 Room 2 t1 fh t2 fh t3 fh de1 mtd mtd fh r4 r3 Room 3 Room 4 de2 Class Exercise • Create a relational graph for this floorplan • Label each edge with the appropriate LCS: mtd, fh • Label each node with the type of gateway: de, t, r Chapter 9: Topological Path Planning
Associative Methods • Create a behavior which converts sensor observations into the direction to go to reach a particular landmark • that landmark has to have two attributes - 1. Perceptual stability - close views of a landmark are similar 2. Perceptual distinguishibility - far away views are different Chapter 9: Topological Path Planning
Associative Methods • Visual Homing • bees navigate to their hive by a series of image signatures which are locally distinctive (neighborhood) • QualNav • the world can be divided into orientation regions (neighborhoods) based on perceptual events caused by landmark pair boundaries Randal Nelson, URochester Daryl Lawton, Advanced Decision Systems Chapter 9: Topological Path Planning
Image Signatures The world Tesselated (like faceted-eyes) Resulting signature for home Chapter 9: Topological Path Planning
Move to match the template Chapter 9: Topological Path Planning
OR2 OR1 Topological Representation as Orientation Regions mountain Metric Map building radio tower tree
Associative Methods • Vehicle can directly perceive when it has entered a new orientation region, by sensing the transition through landmark- pair boundary • a set of angles recorded at a point along the path is called a viewframe • advantages - tight coupling of sensing to homing, - image signature and viewframe do not require explicit recognition of a landmark • disadvantages - require massive storage, - are brittle in the presence of a dynamic world Chapter 9: Topological Path Planning
Case Study • Representation - topological map as an ASCII file in Backus-Naur form, the world is orthogonal • three node types - room, hall and foyer • the map does not show if a corridor is blocked • outside of each door is marked • cartographer construct the route using Dijkstra shortest path algorithm • task manager uses the route to select appropriate abstract navigation behavior (ANB) • Sequencing of behaviors based on current perception (releasers) and subgoal Chapter 9: Topological Path Planning
Hd nodes because Have different perception R3->R7 Chapter 9: Topological Path Planning
Transition Table Chapter 9: Topological Path Planning
Task manager • Not all combinations of nodes are permitted • table not necessarily symmetric • ANB uses information from the database entries corresponding to nodes as parameters for instantiating the script to the current waypoint pair, • in case of a blocked path TM terminates the currently active ANB, directs the robot to the last known node and request from the cartographer a new path from this node to the destination Chapter 9: Topological Path Planning
Execution Exception subscript Chapter 9: Topological Path Planning
Navigation Scripts • Switch(door) case door-not-found: //initialization phase //follow wall until find door if wall is found wallfollow to door else move-ahead to find a wall case door-found: //nominal activity phase move-through-door(door-location) Chapter 9: Topological Path Planning
Summary • Route, qualitative, and topological navigation all refer to navigating by detecting and responding to landmarks. • Landmarks may be natural or artificial; roboticists prefer natural but may have to use artificial to compensate for robot sensors • There are two type of qualitative navigation: relational and associative Chapter 9: Topological Path Planning
Summary (cont.) • Relational methods use graphs (good for planning) and landmarks • The best known relational method is distinctive places • Distinctive places are often gateways • Local control strategies are behaviors • Associative methods remember places as image signature or a viewframe extracted from a signature • can’t really plan a path, just retrace it • direct stimulus-response coupling by matching signature to current perception Chapter 9: Topological Path Planning
What you should be able to do • Define the difference between natural and artificial landmarks; give one example of each • Given a description of an indoor office environment and a set of behaviors, build a relational graph representation labeling the distinctive places and local control strategies for gateways • Describe in one or two sentences: gateway, image signature, visual homing, viewframe, orientation region • Given a figure showing landmarks, create a topological map showing landmarks, landmark pair boundaries, and orientation regions Chapter 9: Topological Path Planning