Download
1 / 24
240 likes | 711 Views
d φ. 2.4. Pöördenurk kui vektor, nurkkiirus ja nurkkiirendus. Joonkiiruse ja nurkkiiruse vektorite vaheline seos. Tangentsiaalkiirendus, normaalkiirendus ja kogukiirendus ning nendevahelised seosed. Vaatame puhast pöördliikumist. Ainepunkti tiirlemine ümber liikumatu telje.

E N D
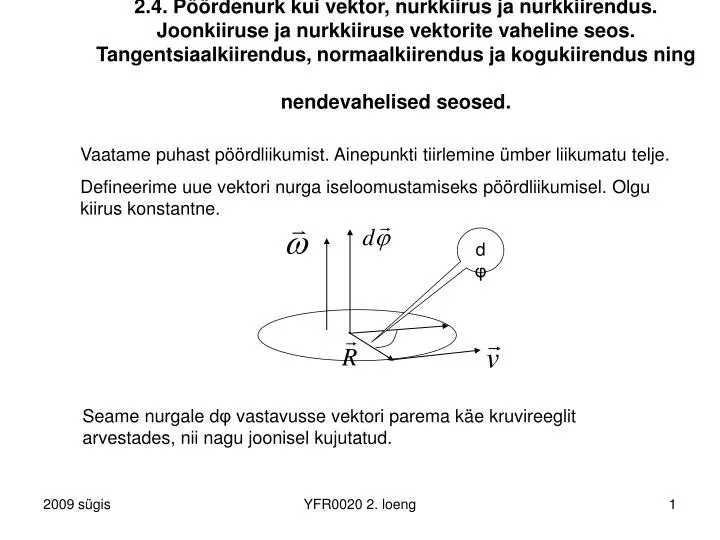
dφ 2.4. Pöördenurk kui vektor, nurkkiirus ja nurkkiirendus. Joonkiiruse ja nurkkiiruse vektorite vaheline seos. Tangentsiaalkiirendus, normaalkiirendus ja kogukiirendus ningnendevahelised seosed. Vaatame puhast pöördliikumist. Ainepunkti tiirlemine ümber liikumatu telje. Defineerime uue vektori nurga iseloomustamiseks pöördliikumisel. Olgu kiirus konstantne. Seame nurgale dφ vastavusse vektori parema käe kruvireeglit arvestades, nii nagu joonisel kujutatud. YFR0020 2. loeng
nurkkiirus nurkkiirendus Analoogiliselt kulgliikumisega saame liikumisvõrrandi: Kiirenev pöörlemine Aeglustuv pöörlemine YFR0020 2. loeng
O Joonkiiruse ja nurkkiiruse vektorite vaheline seos Näitame, et oodatav seos on vektorkorrutis. Kiiruse def. YFR0020 2. loeng
Saadud tulemus on kahe vektori vektorkorrutis. Vektorite järjestuse korrutises vaatame jooniselt. See on kasulik seos järgnevateks tegevusteks YFR0020 2. loeng
Seose saamiseks kiiruste vahel , võtame saadud vektorkorrutisest tuletise. See on korrutise tuletis. Paneme tähele, et vektorite järjekorda ei tohi muuta. Nii õpetati gümnaasiumis. Kasutame seda tarkust. 0 YFR0020 2. loeng
Tavaliselt valitakse koordinaadistiku alguspunkt pöörlemistasandisse ja siis: Nii oli gümnaasiumis. Ühtlase ringliikumise korral saame rääkida perioodist. Teame, et: YFR0020 2. loeng
Tangentsiaalkiirendus, normaalkiirendus ja kogukiirendus. Kiirenduste saamiseks võtame aja järgi tuletise. Jälle on tegemist korrutise tuletisega ja vektorite pärast peame säilitama esialgset vektorite järjekorda. YFR0020 2. loeng
Liidetavate interpreteerimine joonise abil. YFR0020 2. loeng
3. Ainepunkti dünaamika. Dünaamika vaatab kehade liikumist koos liikumise põhjusega-jõuga. Mehaanika põhiülesanne- liikumisseaduse ilmutamine käib dünaamikas läbi jõudude. Peab olema mingi ülim seadus, mis kehtib alati ja kõikjal. See seadus on siis klassikalise füüsika alus ja ka maailmapildi alus. Esimesena üldistas Newton kehade omavahelised käitumisreeglid, võttes nad kokku kolme seadusega. 3.1. Newtoni seadused. YFR0020 2. loeng
Newtoni I seadus Iga keha liikumisolek on muutumatu seni kuni teiste kehade mõju ei sunni seda muutuma. 1) Teisi kehasid pole. Üsna ebatõenäoline. 2) Teiste kehade mõju on kompenseeritud. Väga levinud juhtum. Seda nimetatakse ka inertsiseaduseks. Inerts on keha võime säilitada oma liikumisolek. YFR0020 2. loeng
Newtoni II seadus. Vaba keha diagramm. See on eksperimentaalne fakt ja klassikalise mehaanika alus. Inertsiaalsetes taustsüsteemides, muutumatu massi korral on: a m1<m2 m1 m2 F YFR0020 2. loeng
Teiste kehade mõju on jõud. Jõud on ühe keha mõju teisele, mille tulemusena muutub kehade liikumisolek või nad deformeeruvad. Seejuures pole oluline millist vastastikmõju liiki igal konkreetsel juhul arvestda tuleb. Newtoni seadused on selles mõttes tõeliselt universaalsed. Igasugune liikumine on suhteline. Newtoni I seaduse mõte seisneb selles, et kui kehale ei mõju jõud, siis eksisteerib taustsüsteem kus ta on paigal. Kui ühes taustsüsteemis on keha paigal, siis leidub lõpmatu hulk taustsüsteeme, mille suhtes ta liigub ühtlaselt ja sirgjooneliselt. Neid nimetatakse inertsiaalseteks. Keha inertsust põhjustab keha mass. Mass on kehade fundamentaalne omadus. Pole massita kehi. Mass on kehade inertsimõõt ja gravitatsioonivälja allikas. Inertsiaalne ja gravitatsiooniline mass on tänapäeva mõistes identsed. YFR0020 2. loeng
Kõik see kehtib v<<c, kus c on valguse kiirus. Üldiselt tuleb igal konkreetsel juhul arvestada tekkivat viga. Newtoni II seaduse rakendamisel tuleb alati teha vaadeldavale kehale jõudude inventuur. Seda tegevust ja selle lõpptulemust nimetatakse vaba keha diagrammiks. Kuidas saada jõudusid. Iga keha on jõu allikas. Seega tuleb otsida kehi. Tuleb treenida otsimist. Maksab kogemus. Kehi on raske varjata. Sellel põhineb otsimine. YFR0020 2. loeng
15. Newtoni III seadus Eksperimentaalne. Igasugune mõju on samal ajal ka vastumõju. Vastastikmõjus olevad kaks keha mõjutavad teineteist moodulilt võrdsete ja suunalt vastupidiste jõududega, mis on rakendatud kummalegi kehale. See tähendab, et jõu järgi saab keha otsida. Kui on keha siis on ka jõud. YFR0020 2. loeng
Newtoni III seadus on aluseks jõudude otsimisel ja selle järel keha otsimisel. Tähtis asjaolu, sest inimene otsib vähemalt pool ärkveloleku ajast kehi, mida ta arvab endal vaja minevat. Näited: 1. Inseneri praktikas kehade purunemise põhjuste otsimine. 2. Miini otsimine. 3. Kehade otsimine kosmoses. YFR0020 2. loeng
3.2. Impulss, jõuimpulss, impulsi jäävuse seadus. Modifitseerime Newtoni II seadust. m=const Klassikaline mehaanika Tähistame: on impulss. Tähtis suurus, sest selle kohta kehtib jäävuse seadus. NB! Alati peab vaatama millise taustsüsteemi suhtes tahame saada. Kasutamisel saab opereerida projektsioonidega telgedel. YFR0020 2. loeng
Eraldame muutujad Jõuimpulss. On kasulik mõiste rakendustes. Pole jäävusseadust. YFR0020 2. loeng
Impulsi jäävuse seadus. Impulsi jäävuse seadus on üks füüsika põhiseadusi. Isoleeritud süsteemi impulss on jääv. Tõestame selle. Isoleeritud süsteem- puuduvad välisjõud või nad on kompenseeritud. Olgu kahest kehast koosnev süsteem. Vastavalt Newtoni III seadusele mõjutavad nad teineteist võrdsete ja vastassuunaliste jõududega. Need on süsteemi sisejõud. Jõud on võrdne impulsi muuduga. Seega võime kirjutada: ehk Viimasest järeldub Impulsside summa on antud juhul süsteemi impulss. Kehade arvu suurendamine toob juurde paarisarvu sisejõudusid, mis alluvad jälle Newtoni III seadusele ja annavad summeerimisel nulli. YFR0020 2. loeng
Märkused: Impulsi jäävuse seadus kehtib alati ja pole vahet mis tüüpi kehadele seda rakendada. Kõik süsteemi impulsid tuleb leida ühe ja sama inertsiaalse taustsüsteemi suhtes. Kuna süsteemi impulss on mittekokkupõrkuvate kehade korral praktikas vähehuvitav, siis on mõistlik seda veidi modifitseerida. Impulss enne põrget = Impulss pärast põrget YFR0020 2. loeng
z’ z K y’ y x’ x 3.3. Galilei teisendused, relatiivsusprintsiip mehaanikas. Valime telgedel ühikvektorid . Leiame vektori projektsioonid telgedel. K’ P Meie YFR0020 2. loeng
Punkti P asend K-s: P(x,y,z) P asend K’-s: P(x’,y’,z’) Leame seose nende koordinaatide vahel. Eeldus: aeg kulgeb ühteviisi mõlemas taustsüsteemis: t=t’ Aega loeme hetkest, mil taustsüsteemid langesid kokku. Saame Galilei teisendused. YFR0020 2. loeng
Kiiruste leidmiseks diferentseerime aja järgi Ehk vektorkujul. Liikuva taustsüsteemi kiirus vaatlejaga seotud taustsüsteemis Punkti kiirus vaatlejaga seotud taustsüsteemis Punkti kiirus liikuva taustsüsteemi suhtes YFR0020 2. loeng
Vaatame Galilei teisendusi. Saime kiiruste liitmise reegli. Liikuva taustsüsteemi kiirus vaatlejaga seotud taustsüsteemis Punkti kiirus liikuva taustsüsteemi suhtes Punkti kiirus vaatlejaga seotud taustsüsteemis Kui keha liigub aga kiirendusega liikuva taustsüsteemi suhtes, siis kiirendus meiega seotud taustsüsteemi suhtes on. Kiirenduste saamiseks võtame kiiruste valemist aja järgi tuletise. YFR0020 2. loeng
Kuna kiirendus on Newtoni seaduste põhisisu, siis võib öelda, et kõik kiirenduseta üksteise suhtes liikuvad taustsüsteemid on samaväärsed. Kõik kehad on Newtoni seaduste suhtes ühtmoodi käituvad. (elektron, kivi, aatom, planeet, täht, galaktika). Inertsiaalsed on taustsüsteemid kus kehtivad Newtoni seadused. YFR0020 2. loeng