Download
1 / 26
290 likes | 454 Views
Stabilitatea IMEM (BIBO). Dacă se întâlneşte situaţia ca α =0 se întrerup calculele. E xistă totuşi o modalitate de determinare a stabilitatii IMEM pentru astfel de situaţii . Această modalitate se bazează pe variaţia unui parametru cu un ε foarte mic. Stabilitatea relativa.

E N D
Dacă se întâlneşte situaţia ca α=0 seîntrerup calculele. Există totuşi o modalitate de determinare a stabilitatii IMEM pentru astfel de situaţii. Această modalitate se bazează pe variaţia unui parametru cu un ε foarte mic.
Stabilitatea relativa Asigurarea stabilitatii sistemelor este o cerinta esentiala in proiectarea acestora. Exista putine situatii in care se impune o functionare instabila, cum ar fi, de exemplu, oscilatoarele (si in acest caz trebuie garantata stabilitatea oscilatiilor). Din aceste considerente, trebuie garantata plasare polilor sistemului in semiplnul complex stang. Aprecierea calitatii de BIBO stabilitate se poate face si prin intermediul raspunsului indicial h(t). cat de mult se apropie sistemul de situatia de BIBO instabilitate In domeniul timp, aceasta apreciere se poate face pe baza abaterilor lui h(t) fata de: Abaterile lui h(t) sunt cu atat mai mari (si de durata mai mare) cu cat polii lui G(s) situati in semiplanul complex stang sunt mai apropiati de axa reala.
Stabilitatea relativa Grad de stabilitate Rezerva de stabilitate Rezerva de stabilitate • Prin proiectare se impune o anumita configuratie (teoretica) a polilor in semiplanul complex stang. • Pozitiile reale ale polilor se afla in apropierea celor teoretice datorita: • impreciziei modelului matematic • variatiei lente a parametrilor sistemului real (sub influenta factorilor mediului ambiant sau a imbatranirii materialelor) Este posibil ca sistemul (desi proiectat initial stabil) sa ajunga la limita de stabilitate sau chiar sa devina instabil.
Solutia Se vor plasa de la inceput polii la stanga unei drepte De retinut: exista o dependenta intre zerourile polinomului Δ(s) si coeficientii sai: Variatii mici ale coeficientilor produc variatii mari ale polilor.
Realizarea rezervei de stabilitate • In Δ(s) se face schimbarea de variabila s=s-αmin • Se aplica criteriile de stabilitate polinomului Δ(s-αmin) • Satisfacerea conditiilor unuia dintre criterii este echivalent cu localizarea polilor in {Re s < - αmin} Exemplu: se considera polinomul: in care coeficientii au valorile nominale. Se cere sa se verifice daca sistemul corespunzator are rezerva de stabilitate αmin=1, in conditiile in care α2 este incert, el variind in intervalul [21, 31]. Se face schimbarea s=s-1 si se inlocuieste α2 cu α2=26+ε, unde ε apartine lui [-5, +5]. Se obtine:
-60/7 6 -5 5 Concluzie: rezerva de stabilitate este asigurata oricare ar fi variatia lui α2 in domeniul considerat.
Gradul de stabilitate Distanta dintre axa imginara a planului complex si polul cel mai apropiat al functiei de transfer G(s).
Domenii parametrice de stabilitate IMEM Din diverse motive, este necesar sa se cunoasca intre ce limite se pot modifica parametrii unui sistem fara ca acesta sa-si piarda stabilitatea IMEM sau sa i se reduca rezerva de stabilitate. Se are in vedere, pe langa motivele pierderii stabilitatii mentionate anterior, si existenta unor parametri ajustabili ai sistemului, care pot fi modificati de operator (atunci cand este necesar). Pentru sisteme cu grad mai mic sau egal decat 3, se pot aplica criteriile de stabilitate. Pentru sisteme de ordin mai mare, problema consta in rezolvarea unui sistem de n inecuatii neliniare, ceea ce este dificil de realizat.
Simplificare a procedurii Se vor determina mai intai acele valori ale parametrilor pentru care polinomul Δ(s), initial hurwitzian, devine nehurwitzian ca urmare a variatiei parametrilor sai. Deoarece zerourile lui Δ(s) depind continuu de coeficientii sai, acesta devine nehurwitzian atunci cand unele ditre zerourile sale se deplaseaza din semiplanul complex stang spre cel drept si cel putin unul dintre ele atinge axa imaginara. Δ(s) devine nehurwitzian atunci cand: Aceste ecuatii reprezinta frontiera dintre domeniile de stabilitate si instabilitate IMEM.
Exemple: Dacă se ţine seama de condiţia necesara de stabilitate a sistemului (coeficientul numitorului mai mari dacît 0):
Domeniul parametric de stabilitate IMEM 1/2 -1/2 -1/2
Indici de calitate ai raspunsului indicial In functie de localizarea polilor, sistemele dinamice liniare invariante in timp se impart in urmatoarele categorii sisteme instabile IMEM care au cel putin un pol in semiplanul complex drept sau pe axa imaginara sisteme stabile IMEM ale caror poli sunt situati in semiplanul complex stang sisteme stabile IMEM ale caror zerouri sunt situate in semiplanul complex stang sisteme stabile IMEM care au cel putin un zero in semiplanul complex drept sau pe axa imaginara Sisteme de defazaj minim Sisteme de defazaj neminim
Marea majoritate a sistemelor tehnice sunt sisteme stabile IMEM cu zerouri in semiplanul complex stang. Raspunsul acestor sisteme poate fi: • oscilant amortizat:
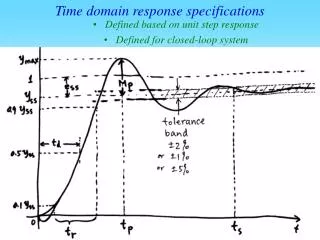
In cazul raspunsului indicial oscilant amortizat se utilizeaza urmatorii indici de calitate: Suprareglarea Durata regimului tranzitoriu, ts Durata de crestere, tc In cazul raspunsului indicial aperiodic se utilizeaza urmatorii indici de calitate: Durata regimului tranzitoriu, ts Durata de crestere, tc
Exemplu: graf asociat unui sistem algebric Pe baza regulii lui Cramer se obtine:
Suma coeficientilor tuturor buclelor Produsul coeficientilor buclelor care nu au noduri comune
Numaratorii pentru y1 Asociat lui u1 apare (1-a22)b1 care se obtine din Δ prin pastrarea numai a coeficientilor arcelor care nu au noduri comune cu arcul de la u1 la y1, adica (1-a22) care se inmulteste cu coeficientul b1al arcului dintre u1 si y1 Asociat lui u2apare a12b21 in care a12b2 este coeficientul arcelor de la u2 la y1si 1 se obtine din Δ din care s-au eliminat coeficientii tuturor buclelor care au noduri comune cu nodurile situate pe calea de la u2 la y1.
In general, valoarea transmitantei Tij dintre nodurile i si j , respectiv dintre marimile xisi xj se obtine cu formula lui MASON: • in care: • suma dupa k se face pentru numarul maxim de cai intre nodurile i si j (toate arcele fiind parcurse in sensul fluentei); • (Cij)k este transmitanta caii directe (nu se trece de doua ori prin acelasi nod), de indice k, intre nodurile i si j; • Δ este determinantul grafului, care se calculeaza cu formula: unde Bq (de la 1 la N) sunt tranmitantele buclelor existente in graf. REGULA DE DETERMINARE A LUI Δ Δ=1-(suma transmitantelor tuturor buclelor)+(suma produselor transmitantelor tuturor combinatiilor de doua bucle care nu au noduri comune)-(suma produselor transmitantelor tuturor combinatiilor de trei bucle care nu au noduri comune)+… • (Δij)k este cofactorul (relativ la Δ) al caii k. Acesta se determina din Δ eliminand buclele care nu au noduri comune cu calea k
Exemplu 1: Exemplu Numarul de bucle este N=3 cu transmitantele: B1=-G2G5 B2=-G3G4 B3=-G1G2G3G6 Δ=1+ G2G5+G3G4+G1G2G3G4 deoarece toate buclele au noduri comune • Caile directe sunt: • de la U1 la Y: (C1)1=G1G2G3; rezulta (Δ1)1=1 • de la U2 la Y: (C2)1=G3; rezulta (Δ2)1=1 • Rezulta functiile de transfer:
Exemplu 2: aplicarea formulei lui Mason Se cere determinarea functiei de transfer echivalente Pentru aplicarea formulei lui Mason nu este necesar sa se deseneze graful; se vor numerota marimile din sistem, ca in figura. • Numarul de bucle este N=3 si u transmitantele: • 4-5-6-7-9-4 cu transmitanta B1=-G2G3G6 • 6-7-8-10-6 cu transmitanta B2=G3G4G5 • 2-3-4-5-6-7-8-11-2 cu transmitanta B3=G1G2G3G4G7 • Δ=1+G2G3G6-G3G4G5+G1G2G3G4G7 deoarece toate buclele au noduri comune Calea directa de la U la Y este 1-2-3-4-5-6-7-8 (C1)1=G1G2G3G4; rezulta Δ1=1
Grafurile de fluenta din ultimele doua exemple fac parte dintr-o clasa caracterizata de: • toate buclele au noduri comune, ca urmare Δ=1-(suma transmitantelor tuturor buclelor); • toate caile directe au noduri comune cu toate buclele, ca urmare Δk=1, k=1…N Schemele bloc ale sistemelor tehnice fac parte (de regula) din aceasta clasa de grafuri de fluenta. Pentru aplicarea formulei lui Mason in astfel de cazuri se utilizeaza urmatoarea regula: Functia de transfer echivalenta intre marimea de intrare si marimea de iesire este egala cu raportul dintre suma functiilor de transfer ale cailor directe intre cele doua marimi si 1 minus suma algebrica a functiilor de transfer ale buclelor (care au, dupa caz, semnul “-” pentru reactia negativa si semnul “+” pentru reactia pozitiva).