Download
1 / 14
140 likes | 288 Views
Experiment 17. Two Differentiators Circuit. Analog Computing. Analog computers First were mechanical systems. Electrical analog computers were developed in the early 1940’s and used extensively. Maximum speed of response was limited to less than 10 MHz. Analog controllers

E N D
Experiment 17 Two Differentiators Circuit
Analog Computing • Analog computers • First were mechanical systems. Electrical analog computers were developed in the early 1940’s and used extensively. • Maximum speed of response was limited to less than 10 MHz. • Analog controllers • PID (proportional-integral-derivative) controllers • Thermostats
iR + iC + i =0 where i = 0mA iC =C1 dVin/dt iR = [0V – Vo]/R1 Vo = -R1C1dVin/dt iR iC i = 0 If Vin = 0.5V sin(wt), then Vo =[ -R1C1wcos(wt)] x 0.5V where -R1C1w is the maximum gain of the differentiator.
Sine – Cosine Conversion • Vin = sin(wt) • Vo = -R1C1wcos(wt) • Vo = R1C1wcos(wt – 180o) • Vo = R1C1w sin(wt – 180o + 90o) • Vo = R1C1w sin(wt – 90o) When the input voltage is sinusoidal, the output voltage has a phase shift of 90o with respect to the input voltage.
Limitation of Ideal Differentiator • If the input contains electronic noise with high frequency components, the magnitude of the high frequency components will be amplified significantly over the signal of interest and the system could become unstable. • It is necessary to modify the circuit to reduce or eliminate such effects (see Practical Differentiator circuit in Experiment 16 of the lab manual).
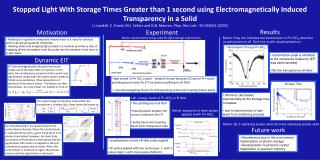
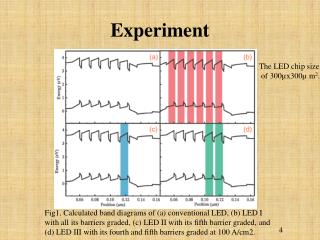
Circuit to be constructed Velleman Function Generator
Circuit Construction • Position of the two switches changes the maximum gain of the differentiator. • R1 is determined by setting w R1 C1 = 1 when f is 7.23 kHz. Use 0.1 µF for C1. • R2 is determined by setting w R2 C1 = 1 when f is 723 Hz. • Use two of the three slide switches in the parts kit • Three pin black rectangle with knob • Middle pin should be connected to the circuit • Either one of the outer two pins should be connected to the other portion of the circuit • Sliding the knob from right to left changes which outer pin is shorted to the middle pin
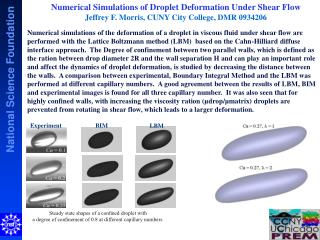
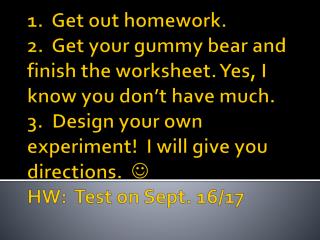
Phase Shift --Dt --
Phase Shift as a Function of Frequency • The phase shift between the input voltage and the output voltage of the op amp will change from 90o to 180o.
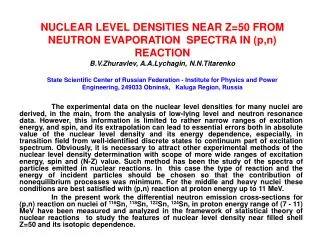
Caution: PSpice Transient Analysis Issue Information in first half cycle is incorrect because the initial charge on the capacitor is zero.
Measurement of Phase Angle • There are two sets of instructions in the Week 11 Module. • Phase Delay.pdf, which explains how to make a phase angle calculation using the information displayed when the Oscilloscope function of the Velleman oscilloscope is used. • You should become familiar with this technique. • Magnitude and Phase.pdf, which explains how to use the automated measurement tools on the Velleman scope to obtain the magnitude and phase of a signal at a single frequency and over a range of frequencies.
dB • dB is an abbreviation for decibels