Download
1 / 27
270 likes | 368 Views
Explore the design of a suspension system for a manned lunar rover, extendable to Martian landscapes. Recommendations for spring rates and dampening coefficients. Utilizes modeling strategies, animation, and preference elicitation to optimize performance.

E N D
Lunar Rover Suspension Final Project Presentation ME 6105 – Modeling Simulation in Design Georgia Institute of Technology April 26, 2007
Team Members Stephanie Thompson • 2nd year MSME student • Advisor : Dr. Farrokh Mistree • Research : Material Design Nathan Young • 1st year MSME student • Advisor : Dr. Mervyn Fathianathan • Research : Adaptive Systems Robert Thiets • 1st year MSME student • Advisor : Dr. Bert Bras • Research : Alternative Fuels
Presentation Outline • Introduction • Project Overview • Objectives Hierarchies • Influence Diagram • Dymola Model • Key Assumptions • Modeling Strategy /Description • Animation • Problems and Solutions • Simulation Time Reduction • Preference Elicitation • AIAA Modeling Conference • Questions
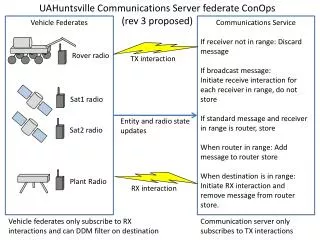
Project Overview • NASA’s Vision for Space Exploration includes a goal to return to the moon by the year 2020 as a launching pad to manned exploration of Mars • One important task for both lunar and martian exploration is the design and development of unpressurized and pressurized rovers for use in both environments • In this project, we will concentrate on the design of the suspension for a manned lunar rover with extensibility to the martian landscape • Specifically, we seek to provide a recommendation for target values of effective spring rates and dampening coefficients
Dymola Model – Key Assumptions • Rover suspension and terrain components • The rover never breaks contact with the terrain • The rover has a perfectly rigid and mass-less wheels/tires • The rover travels at a constant velocity regardless of the terrain • The terrain only influences the vertical position of the contact points between the models. • Zero friction between the terrain and the suspension
Dymola Model – Strategy • Two main subsystems : • Rover Suspension • Test Frame • Time Varying Terrain Signal • Amplitude (m) vs. Time (s) • Terrain Signal Split • Left to Right Time Delay • Front to back Time Delay • Sensor • Needed to measure settling time • Fixed World
Dymola Model - Strategy Rover Chassis • MacPherson based Suspension geometry • Point mass which simulates both payload and variation in gravitation • Torsion Springs / Dampers • Connection Nodes
Dymola Model - Strategy Test Frame • Four Linear Actuators • Four connection nodes • Four signal input nodes • Fixed displacement • Cut Frames
Dymola Model – Terrain Input Amplitude (m) Time (s)
Simulation Time Reduction Kriging Interpolation • Used as a surrogate model to estimate the utility of a given combination of spring and damper values • Interpolation is based of a random data set generated by the model • Requires substantially less simulation time vs. running the model • Error of estimation is known. If error is above a set threshold, the model can be run to generate additional data points, reducing the error of the interpolation • Kriging Model Created in Model Center by Tom Groshans
Preference Elicitation Preference Equation: • A: Acceleration • T: Travel • ST: Settling Time
Preference Elicitation 1. U(T0.5, A|, ST0) ~ U(T0.5, A0.5, ST0.5) U(0.101 m, A| , 4.5 s) ~ U(0.3 m, 1.03 m/s2, 0.96 s) A| = 0.8 m/s2 U(A|) = 0.768 2. U(T0.5, A||, ST1) ~ U(T0.5, A0.5, ST0.5) U(0.101 m, A|| , 0 s) ~ U(0.101 m, 1.03 m/s2, 0.96 s) A|| = 1.5 m/s2 U(A||) = 0.132
Preference Elicitation 3. U(T|, A0.5, ST0) ~ U(T0.5, A0.5, ST0.5) U(T|, 1.03m/s2 , 4.5 s) ~ U(0.101 m, 1.03 m/s2, 0.96 s) T| = 0.085 m U(T|) = 0.653 4. U(T||, A0.5, ST1) ~ U(T0.5, A0.5, ST0.5) U(T||,1.03 m/s2 , 0 s) ~ U(0.1011 m, 1.03 m/s2, 0.96 s) T|| = 0.165 m U(T||) = 0.098
Preference Elicitation 5. (T0, A|||, ST0.5) ~ (T0.5, A0.5, ST0.5) (0.3 m, A|||, 0.96 s) ~ (0.101 m, 1.03 m/s2, 0.96 s) A||| = 0.75 m/s2 U(A|||) = 0.821 6. (T1, A||||, ST0.5) ~ (T0.5, A0.5, ST0.5) (0 m, A||||, 0.96 s) ~ (0.101 m, 1.03 m/s2, 0.96 s) A|||| = 1.1 m/s2 U(A||||) = 0.419
Preference Elicitation • Solution does not yield a result which is consistent with our expected preferences • Solution is more or less invariant with regard to specific elicitation values • New elicitation questions are used to solve problem
Preference Elicitation 1. U(T0, A0.2, ST|) ~ U(T0, A0.5, ST0.5) U(0.3 m, 1.4m/s2 , ST|) ~ U(0.3 m, 1.03 m/s2, 1.15 s) ST| = 0.45s U(ST|) = 0.932 2. U(T0.5, A0.8, ST||) ~ U(T0.5, A0.5, ST0.5) U(0.1 m, 0.8 m/s2 , ST||) ~ U(0.1 m, 1.03 m/s2, 1.15 s) ST|| = 2.0 m/s2U(ST||) = 0.117
Preference Elicitation 3. U(T|, A0, ST0.2) ~ U(T0.5, A0, ST0.5) U(T|, 2.4 m/s2 , 1.7 s) ~ U(0.101 m, 2.4 m/s2, 1.15 s) T| = 0.08 m U(T|) = 0.692 4. U(T||, A0.5, ST0.8) ~ U(T0.5, A0.5, ST0.5) U(T||,1.03 m/s2 , 0.7 s) ~ U(0.1011 m, 1.03 m/s2, 1.15 s) T|| = 0.12 m U(T||) = 0.334
Preference Elicitation 5. U(T0.2, A|, ST0.5) ~ U(T0.5, A0.5, ST0.5) U(0.14 m, A|, 1.15 s) ~ U(0.101 m, 1.03 m/s2, 1.15 s) A| = 0.85 m/s2 U(A|) = 0.710 6. U(T0.8, A||, ST0.5) ~ U(T0.5, A0.5, ST0.5) U(0.07 m, A||, 1.15 s) ~ U(0.101 m, 1.03 m/s2, 1.15 s) A|||| = 1.1 m/s2 U(A||||) = 0.419
AIAA Modeling Conference • AIAA Modeling and Simulation Technologies (M&ST) Conference and Exhibit • 20 - 23 Aug 2007, Hilton Head, South Carolina • Abstract for a paper based on this project has been accepted for this conference • Addresses the design and development of flight simulation hardware, software, systems, innovative approaches, applications, and relative advances that keep modeling and simulation tools a viable, effective, and efficient engineering tool.
Questions ? ???