Download
1 / 22
220 likes | 309 Views
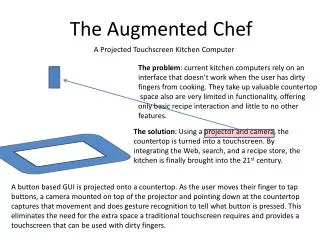
Building the Augmented Classroom. Components for everyday mobile collaborative AR. The Augmented Classroom - Overview. Spontaneous collaboration of mobile users Optical Tracking, use of markers as tangible user interfaces. Standard User Equipment. Mobile AR System

E N D
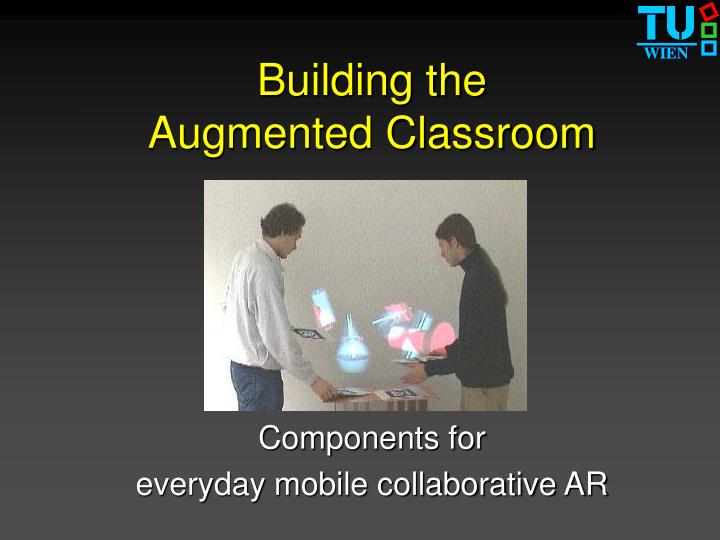
Building theAugmented Classroom Components for everyday mobile collaborative AR
The Augmented Classroom - Overview • Spontaneous collaboration of mobile users • Optical Tracking, use of markers as tangible user interfaces
Standard User Equipment • Mobile AR System • Backpack with CPU& connectors • Optical See-throughHMD • Head mountedcamera
User Equipment Enhancements • Pen is replaced by„Pinch Gloves“ • PIP is mounted to thewrist of the left hand • -> Both Hands are freeto interact with thereal world
User Equipment Details (1/6)Pinch Gloves: Evolution • First Generation:Markers sewed onto glove
User Equipment Details (2/6)Pinch Gloves: Evolution • Second Generation:Rigid structure carrying markers
User Equipment Details (3/6)Pinch Gloves: Evolution • Second Generation:Rigid structure carrying markers Hypothesis: Constant offset in space
User Equipment Details (4/6)Pinch Gloves: Evolution • Third Generation: • Finger-free • Cables covered • Only one button • Lightweight Version • 3 Buttons on thumb • Markers attachedseperately
User Equipment Details (5/6)Modified PIP • Wrist-attached to keep hands free • Due to inacurate optical tracking, aTrack-pad is usedfor 2D input.
User Equipment Details (6/6)Headset • Uses new Firefly FW camera with 4mm lens. • Nearly 90° FOV • Tracking area bigger than HMD FOV
Table for overhead tracking • Lightweight table with camera for overhead tracking
Software Enhancements • Improvements in usability introduced by • One-shot quick calibration for HMD & gloves • Shared tracking using multiple cameras
Software Details (1/9)HMD Calibration • Optical tracking must be calibrated in ARToolkit • Remaining problem: offset between camera coordinate system and eye coordinate system. CCS ECS
Software Details (2/9)HMD Calibration • SoCameraCalibrationKit: Calibration Marker Tracked position in overlay image Calibration reference Align marker with calibrationreference
Software Details (3/9)HMD Calibration • SoCameraCalibrationKit: • Press Button -> Offset is calculated and writtento OT node for camera offset Marker and tracked position arenow aligned correctly.
Software Details (4/9)Glove Calibration • A Similar tool is provided to calibrate the „Pinch Point“ of the gloves • The offset varies for every user, and can be configured with a single click
Software Details (5/9)Shared Tracking • Optical tracking fails: • Marker (partially) out of FOV of camera • Marker occluded • Marker oriented away from camera • Marker not recognized
Software Details (6/9)Shared Tracking • Solution / Improvement: • Use several cameras, sharing their tracking data over the network • Dynamically determine reference markers (seen by 2 or more cameras) • Calculate position ofhidden marker fromreference + remotecoordinates
Software Details (7/9)Shared Tracking • Opentracker implementation (1/2):
Software Details (8/9)Shared Tracking • Opentracker implementation (2/2):
Software Details (9/9)Shared Tracking • Results: