Download
1 / 7
70 likes | 329 Views
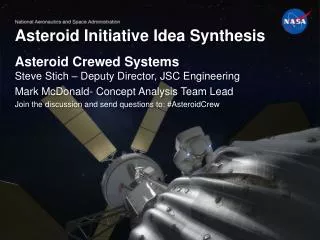
Asteroid Initiative Idea Synthesis Workshop Crew Systems Session. 25 September 2013. Using Existing Robotics to Enhance Crew Prospecting Operations. Prepared by: J. Lymer Lymer.John@ssd.loral.com 3825 Fabian Way Palo Alto, CA 94303.4604 USA.

E N D
Asteroid Initiative Idea Synthesis Workshop Crew Systems Session 25 September 2013 Using Existing Robotics to Enhance Crew Prospecting Operations Prepared by: J. Lymer Lymer.John@ssd.loral.com 3825 Fabian WayPalo Alto, CA 94303.4604USA
Creating a Robotics Center of Excellence in Palo Alto • A leader in Intelligent Robotics and Automation - enhancing the performance of skilled experts on-orbit and on the ground • Building on 4 decades of space robotics to serve US Gov. and others • MDA robotics experts being infused to Palo Alto from Pasadena and Toronto • New robotics facilities and operations based in Palo Alto, ready to support NASA missions Vancouver, BC Satellite Missions Palo Alto, CA Space Systems, Robotics and Automation Toronto, ON Space Robotics Pasadena, CA Robotics & Mechanisms Denver, CO Engineering support Houston, TX Engineering services
SSL’s Proposed ARV: State of the Art SEP and Robotics • Our Two-Part ARV contains a Solar Electric Power Tug and a Robotic Servicing Spacecraft • SEP Tug uses commercial industry leading array, power processing and thruster technologies • The Robotic Servicer employs robotics derived from the ISS Dextre and DARPA FREND coupled with next generation control techniques for selectable autonomy
Robotics Improve Crew Prospecting Effectiveness • The Robotic Servicing Spacecraft hosts two types of robotic assistants • 13m extendable arm provides the Crew Prospecting Mission with • Ultra-low impact capture and berthing of Orion to the captured asteroid to prevent destructive disturbances to a loosely aggregated asteroid (rubble pile) • All ARV robotics and infrastructure reused from deep space segment of Redirect Mission – alternative to impacting Orion design with robotics in time to support early prospecting mission date • Extended crew and equipment positioning and support around captured asteroid • ‘Touchless’ crew access to asteroid surface, pre-EVA preferred worksite selection and preparation, asteroid capture device manipulation, sample handling • Same robotics that completed deep space asteroid inspection, deflection and capture activities 13m long arm positions Crew at Asteroid Surface
Robotics Improve Crew Prospecting Effectiveness (Cont’d) • The Robotic Servicing Spacecraft hosts two types of robotic assistants • 3 dexterous robotic arms provide the Crew Prospecting Mission with • Pre-EVA detailed petrology surveys to prepare Crew with basic scientific data to maximize prospecting activity efficiency • Detailed ground based analysis with selected instruments at promising locations identified by the prospecting crew • Instrument handling and repetitive, microscopic survey and data collection • Small sample collection, storage and transfer to cache after the EVA • Same robotics that completed deep space asteroid inspection, deflection and capture activities 3m dexterous arms provide instrument, tool and repetitive micro-prospecting support
Robotic Assistants for the Crew Exist and are Ready for Action • The 13m arm is built for flight and resides at GSFC • Joints from ISS Dextre, redundant motors from Canadarm2, end effector from Shuttle Arm • Next generation avionics and advanced control software • Includes natural feature based machine vision and visual servo control for capture of Orion and other free flying objects derived from Orbital Express • Telescoping boom prototype built in MDA Brampton facility • The 3m dexterous arms are reproductions of the DARPA FREND arm built for Satellite Servicing • Engineering model at NRL • Flight units for DARPA Phoenix mission
Man – Machine Cooperation Exploiting the best of each to achieve the unimaginable