Download
1 / 38
390 likes | 597 Views
Investigation Report on the Rescue Problem at Hanshin-Awaji Earthquake in Kobe. Satoshi Tadokoro, Kobe Univ. Toshi Takamori, Kobe Univ. Koichi Osuka, Kyoto Univ. Saburo Tsurutani, Kobe Steel. IROS 2000, Takamatsu, Nov. 3, 2000. Hanshin-Awaji Earthquake.

E N D
Investigation Report on the Rescue Problem at Hanshin-Awaji Earthquake in Kobe Satoshi Tadokoro, Kobe Univ. Toshi Takamori, Kobe Univ. Koichi Osuka, Kyoto Univ. Saburo Tsurutani, Kobe Steel IROS 2000, Takamatsu, Nov. 3, 2000
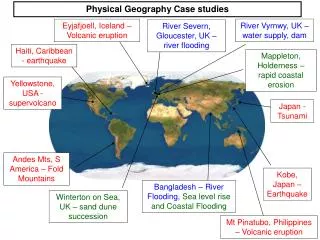
Hanshin-Awaji Earthquake • January 17, 1995, 5:47 am Magnitude 7.2 • Serious Damage Region 20 x 1 km (13 x 0.6 mi)People seriously effected: 2,300,000Deaths: 6,432 ++ Injured: 43,800 ++Buildings Damaged: 530,000fully destroyed: 104,906, fully burnt: 6,148, half destroyed: 144,272 Fire: 285large scale: 14 (>10,000m2 (3600 mi2)) largest: Nagata Ward • Direct Damage: 10 trillion yen (100 billion US$)
Earthquake Disaster • > 3 times/year Taiwan Top 10 earthquakes in the 20th century
Cause of Death and Injury inHanshin-Awaji (Kobe) Earthquake • Death • Crush and Suffocation by 80%Building Destruction • Burn 10% • Injury • Collapse of Buildings and MostTumble of Furniture
Typical Collapse of Buildings • Crush of 1st floor 30cm (1ft) • In a minute Kobe, 1995
Apartment House of a Student (by S. Fuji) Kobe, 1995
From the 2nd Floor (by S. Fuji) Kobe, 1995
Search and Rescue • Residents, Civilians, Volunteers:--- Main rescuer • Firefighters, Policemen:--- Too few in number • Self-Defense Force--- Too late by information isolation of stricken area The disaster was much larger than supposed possible damage. Taiwan
Expected Contribution ofRobotics • Industrial Robot Contribution • Save workers from 3D jobs • Demanding, Dirty, Dangerous • Cost Reduction • Efficiency Improvement • Quality Improvement • Rescue Robot Contribution • …... (Kawasaki Heavy Industry Co.)
Dream of Robotics and AI If mighty robot heroes in SF and comics ….. (Mighty Atom, Osamu Tezuka) (Gundam)
Search & Rescue Process • Search Collect information Estimate the possibility of buried person Identify the position • Excavation of debris Dig a hole, Destroy obstacles, Take out debris Make secure space • Rescue Pull out the body outside, Treat victims Transfer to the hospital
AdvancedSearch Tools Heartbeat detector using microwave Optical fiber scope Acoustic investigator
RescueTools Suspender Power Spreader/Cutter/Jack Removal Work Mobile Air Jack
Wall Climbing Robot Rescue Robots !!In Japan RoboCue Fire Serarch RoboFighter
Activities of robotics in Japan • JSME Robotics & Mechatronics Div. Research Committee (1995.11~1996.11) • Investigation of search & rescue activities in Hanshin-Awaji Earthquake for the purpose of research & development of rescue robotic infrastructure • JSME Research Committee RC-150 (1997.4~1999.3) • Research & development of robotic systems for search & rescue in large-scale disaster • MITI Humanoid Robot Project
Activities of robotics in Japan • SICE System Integration Division, Rescue Engineering TC • ISCIE Rescue System Forum • SICE Urban Disaster Prevention TC • The RoboCup-Rescue Project • Rescue Robot Contest • JSAI SIG-Challenge Symposium, 1999 • RoboCup-Rescue Symposium, 1999 • IROS, 1999 • ICRA, 2000 • SPIE-UMG, 2000 • ICMAS, 2000 • IROS, 2000 • IECON, 2000 • Global Disaster Information Network, 2000 • RoboCup WC Melbourne, 2000 • ………… • JSME Robotics Mechatronics Conf., 1996, 1997, 1998, 1999, 2000 • Robotics Society of Japan Annual Conf., 1996, 1997, 1998, 1999 • JSME Robotics Mechatronics Symposia, 1997 • JSME Annual Conference,1998 • SICE Urban Disaster Prevention Symposium, 1998 • AI Robot Fair, 1998
Searchable from out of debris Need no standard face/line Searchable faint victim Non-contact search Teleoperation Robustness against environment Transportable by human Rapid setting Need no accuracy Battery drive Need no special knowledge Usable in ordinary social life Easy maintenance Judge alive/death and health condition Search Robot Specification(Committee Report)
Ability for various tasks Robustness against environment Battery drive Teleoperation rather than autonomous system Safety support for human workers Task support for human workers Light weight Simple structure For easy maintenance For easy understanding of usage For reliability Transportable by human or having high self-mobility Easy operation without special knowledge Excavation Robot Specification(Committee Report)
Judge of alive/death and health condition Ability of Life maintenance Ability to reduce the load Mobility to carry victim bodies out Transfer from debris to outside street Transfer from street to hospital Victim Care Robot Specification(Committee Report) Kobe, 1995
Emergency Response System Problems & Expected Functions • Expected Functions • Acquisition, accumulation, relay, selection, analysis, summarization, and distribution of necessary information • Sufficient decision support • Distribution of systems for reliability and robustness • Continuity of operation from ordinary time • Problems • Insufficient supposed scale • Damage of ER centers and members • Cut and congestion of communication • Information isolation of civilians and volunteers • Insufficient information support in decision making
Essential Issues • Number of systems • Huge number of simultaneous break-out • Continuousness from ordinary time • Efficiency • Cooperation with human • Effective organization of local residents • Variety of Problems • Search • Information support • Rescue work Kobe, 1995 • Real-time Disaster Response Research • Response “Action” • Support for residents and civilians • Thorough check of availability • Cost reduction by standardization & open architecture • Extensible mechanism
Mobile Mechanisms in Debris(Hirose, Tokyo Inst. Tech.) Gembu II ParaWalker-II
RoboCup-Rescue Simulation 3D viewer by Shinjoh & Yoshida 2D log viewer by Kuwata
Rescue Robot Contest (RoboFesta) (Osuka, Masutani)
For Creation of Safer Social Systems • Wide human groups concerned<Wideness> • User … Market … Designer … Developer… Researcher … Scientists • Wide range/variety of R&D trials <Variety> • Practical … Prototype … Research level … Idea level • Expert level … Civilian level • For solutions against variety of disasters • Long-range & short-range R&D <Continuity> • 1 year … 3 years … 5 years… 1 decade … 2 decades … 5 decades … 1 century
For the Future Social Safety • International Cooperation of • Researchers • Industries • Governments • Experts • Volunteers • Agencies • Mass Communications • ……… • R&D Scenario of search & rescue systems Disaster Mitigation Culture