Download
1 / 12
130 likes | 288 Views
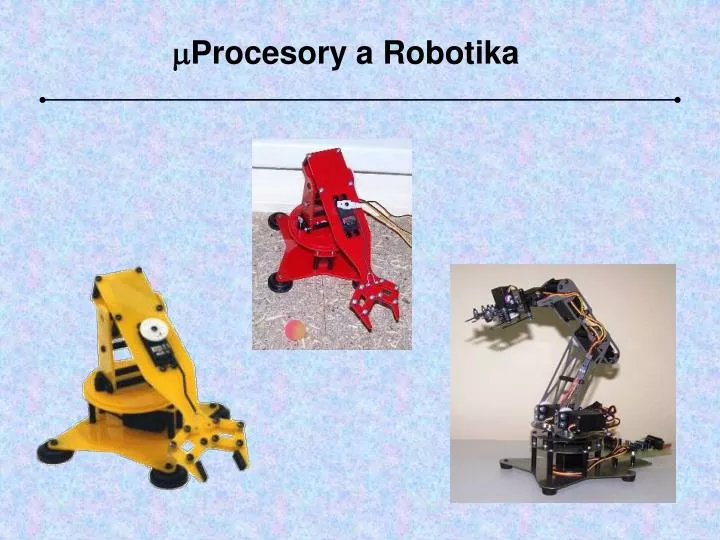
m Procesory a Robotika. Modelářské servomotory (serva). Modelářské servomotory (serva). Řízení serva. 3 dráty. pulzy řízení (cca 50Hz). napájení (5V). zem. 0,5ms. 1,5ms. 2,5ms. 0°. 90°. 180°. Robot Rob1-3. kinematika robota. R. G. 3. 2. R. 1. Robot Rob1-3 – deska řízení.

E N D
Řízení serva 3 dráty pulzy řízení (cca 50Hz) napájení (5V) zem 0,5ms 1,5ms 2,5ms 0° 90° 180°
Robot Rob1-3 kinematika robota R G 3 2 R 1
Robot Rob1-3 – deska řízení napájení (5V) ICSP programátor mP PIC 16F84 vstup – RS232 obvod MAX232 výstup do serv
komunikace s počítačem - inspirováno sběrnicí I2C CLK DATA 3 bity = adresa serva 8 bitů = nová poloha serva STOP bit START bit výchozí stav výchozí stav - bit ze vstupu „DATA“ se zapíše do paměti mProcesoru při náběžné hraně hodinového signálu „CLK“ • výchozí stav = oba signály na log.1 • START bit = zahajuje komunikaci (DATA přejde na log.0 při CLK=1) • STOP bit = končí komunikaci (DATA přejde na log.1 při CLK=1)
mProcesor (MCU) PIC 16F84 (20MHz) RA0÷RA4 ... I/O, RB0÷RB7 ... I/O, OSC ... oscilátor (pracovní frekvence) VSS ... zem, VDD ... napájení, MCLR ... hlavní reset
mProcesor PIC 16F84 – vytvoření a nahrání programu www.microchip.com ►Products ► Development tools ► MPLAB IDE - vývojové prostředí MPLab, zdarma ke stažení - programování mikroprocesorů v Assembleru http://www.belza.cz/digital/jdm.htm - návrhy programátorů pro mProcesory http://www.ic-prog.com – jednoduchý program pro upload programu do MCU