Download
1 / 50
500 likes | 693 Views
Putting a Vortex in Its Place. Chris Snyder National Center for Atmospheric Research. Introduction. Data assimilation spanning a range of scales is difficult---a central unsolved problem in assimilation/state estimation Hurricanes are an obvious example Large-scale “ steering ” flow

E N D
Putting a Vortex in Its Place Chris Snyder National Center for Atmospheric Research
Introduction • Data assimilation spanning a range of scales is difficult---a central unsolved problem in assimilation/state estimation • Hurricanes are an obvious example • Large-scale “steering” flow • Axisymmetric vortex • Asymmetric structure; rain bands • Convective elements, eye-wall details, …
Introduction Importance of remotely sensed observations • Indirect; instrument does not measure model variables • Patchy in time and space • Also special, in-situ observations • Reconaissance flights provide position and intensity of vortex
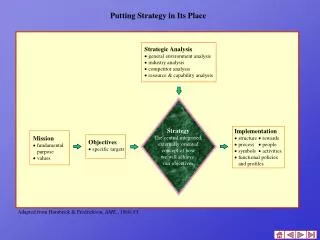
Themes • Initializing forecast/simulation model with vortex in correct location • Two scales: “environment” and vortex • Monte-Carlo (ensemble) methods for DA
Bogussing • ICs for hurricane forecasts often involve some form of bogussing • A simple, empirical approach to intializing hurricane vortex • Obs of intensity, size of vortex (e.g. from reconnaisance flights) • Use these to determine parameters in analytic, axisymmetric model of vortex … a “bogus” vortex • Information from bogus vortex inserted into ICs at observed location of vortex • Operational (NHC/GFDL) scheme • Remove existing vortex from ICs • Spin up vortex in an axisymmetric model, constraining low-level winds to match those from specified bogus vortex • Add axisymmetric vortex to ICs at observed location
A Simple 2D “Hurricane” Experiment • 2D (barotropic) vorticity dynamics • (2400 km)2, doubly periodic domain • Strong vortex (80-km radius) embedded in large-scale turbulent flow • Construct 31 ICs with small disp.s of vortex and small diff.s in large scale • 30 ensemble members + 1 “true”/reference state 10-4 s-1
A Simple 2D Experiment (cont) t=24h 91 km 127 km
Position Errors in Hurricane Data Assimilation • Errors in large scales produce wind errors local to vortex, and thus position/track errors • Vortex intensity and structure also influence track and can lead to position errors • Resulting difficulties for data assimilation: • Influence of obs depends strongly on presence, location of vortex • Even small displacements of vortex imply non-Gaussian pdfs • Most practical DA schemes assume Gaussian prior with stationary, isotropic covariances
Other Non-Gaussian Assimilation Schemes • 4D variational methods • Assume Gaussian prior and observation errors • Compute maximum likelihood estimate given obs in time interval • Nonlinear minimization in many variables • Methods based on “alignment” or “distortion” • Assume prior is known function of uncertain spatial coords • E.g. suppose = (x + x, y + y), with x, y Gaussian • Lawson and Hansen (2004), Ravela et al. (2007)
Assimilation of Position Observations • Wish to avoid difficulties associated with large position errors • Geostationary satellites provide vortex position almost continuously in time • Assimilating such obs should limit position errors in analysis http://cimss.ssec.wisc.edu/tropic/archive/montage/atlantic/2004/IVAN-track.gif
Details of Position Assimilation • Need operator that returns vortex position given model fields, e.g., location of minimum surface pressure • For small, Gaussian displacements, errors are Gaussian with covariances related to gradient of original field • (x + x, y + y) - (x, y) (x, y) • If position obs are accurate and frequent, can assimilate with a linear scheme
Ensemble Kalman Filter (EnKF) • Estimates/models of forecast and obs. pdfs are crucial to DA. • EnKF uses sample (ensemble) estimates • EnKF considers only 1st, 2nd moments---linear scheme
EnKF Analysis Equations • Assimilate obs serially (one at a time) • Given single obs y, any state variable x is updated via • xa = xf + k ( y - yf ), • where • yf = Hxf, • k = cov( xf, yf ) / ( var(yf ) + 2). • Both cov( xf, yf ) and var(yf ) are sample (ensemble) estimates • Loop over state variables, loop over observations • For large ensembles, converges to KF (or BLUE) • No adjoint or minimization algorithm required.
2D Experiment Revisited • 2D (barotropic) vorticity dynamics • (2400 km)2, doubly periodic domain • Strong vortex (80-km radius) embedded in large-scale turbulent flow • Construct 31 ICs with small disp.s of vortex and small diff.s in large scale • 30 ensemble members + 1 “true”/reference state • Simulate obs of vortex position with random error • Assimilate 1-hourly obs with EnKF • Chen, Y. and C. Snyder, 2007: Assimilating vortex position with an ensemble Kalman filter. Mon. Wea. Rev., in press. 10-4 s-1
2D Experiment Revisited With assimilation Without assimilation t=24h 91 km 127 km Have also explored assimilation of intensity and shape of vortex
Experiments with WRF/DART • WRF -- Weather Research and Forecasting model • DART -- Data Assimilation Research Testbed: • http://www.image.ucar.edu/DAReS/DART/ • 36 km horizontal resolution, 35 vertical levels • 26/28 ensemble members • Ensemble initial and boundary conditions are generated by perturbing GFS(AVN) analysis/forecast with WRF-VAR error statistics • Assimilated observations: • hurricane track (center position and minimum sea level pressure from NHC advisories) • Satellite winds (3% available observations) • Compare forecasts initialized from the EnKF mean analysis and from the GFS analysis
Hurricane Ivan 2004 • 36-km horizontal resolution, 28 ensemble members • Assimilate position, intensity and satellite winds every 3h for a total of 24h • Compare forecasts initialized from the EnKF analysis and from the GFS analysis
Hurricane Ivan 2004 • 36-km horizontal resolution, 28 ensemble members • Assimilate position, intensity and satellite winds every 3h for a total of 24h • Compare forecasts initialized from the EnKF analysis and from the GFS analysis
Hurricane Ivan 2004 • 36-km horizontal resolution, 28 ensemble members • Assimilate position, intensity and satellite winds every 3h for a total of 24h • Compare forecasts initialized from the EnKF analysis and from the GFS analysis
Hurricane Katrina 2005 • Analysis: • 36-km horizontal resolution, 26 ensemble members • Assimilate position, intensity, and satellite winds every hour for a total of 12 hours • Forecasts: • Compare forecasts initialized from the EnKF analysis, from the GFS/AVN forecasts and from GFDL analysis at 36-km and 12-km resolutions 12-km 36-km
Hurricane Rita and Ophelia 2005 • 36-km horizontal resolution, 26 ensemble members • Assimilate position, intensity, and satellite winds every hour for a total of 12 hours • Compare forecasts initialized from the EnKF analysis and from the GFS/AVN forecasts.
Typhoon Dujuan 2003 • 45-km horizontal resolution, 28 ensemble members • Assimilate position, intensity, satellite winds, and GPS refractivity for 1 day or 2.5 days • Compare forecasts initialized from • EnKF analysis • WRF 3DVAR analysis (3DVAR, cycling for 2.5 days) • GFS analysis (3DVAR-non) Forecast time (day)
Increments to Vortex Structure RITA at 2005-09-20-23Z
Vortex Spin-up 6-h Accumulated Precipitation Katrina 2005, 12-km
Vortex Spin-up Hurricane Ivan 2004 Surface Pressure Tendency GFS0913 EnKF
2006 Real-time Forecast 2-way nested domain: 36km (183x133x35) – 12km (103x103x35) Assimilation window: 12Z – 00Z, every hour Observations: vortex position, intensity; MADIS satellite wind; dropsondes
Helene (2006) forecast hour forecast hour
Summary • Hurricane track observations can be easily assimilated with an EnKF---effectiveness depends on frequent, accurate observations. • When position errors are larger, non-Gaussian effects important. General purpose ensemble filters (esp. PF) are not feasible solutions. • Track forecasts initialized from the EnKF analysis are significantly improved in retrospective tests. • EnKF analysis produces dynamically consistent increments, and reduces spurious transient evolution of initial vortex.
EnKF Forecast/Analysis Cycle • Forecast: integrate ensemble members to time of next available observations • Update members given new observations • Repeat EnKF initializes its own ensemble and provides short-range ensemble forecast; unifies DA and EF
D3 D1 D2 . obs . obs
21:10 UTC 21:30 UTC km KOUN 21:50 UTC 22:10 UTC km km km WRF/DART for Doppler Radar Analysis reflectivity (color), obs. (20 dBZ, black contour)
Velocity (m/s) Reflectivity (dBZ) Analysis time (UTC) Analysis time (UTC) WRF/DART for Doppler Radar Background minus observation statistics (av’d over 3 analysis cycles/3 elevation angles)