Download
1 / 15
150 likes | 162 Views
Learn how to build and test infrared (IR) pairs for your Boe-Bot robot, including programming examples for roaming, avoiding table edges, and following stripes.

E N D
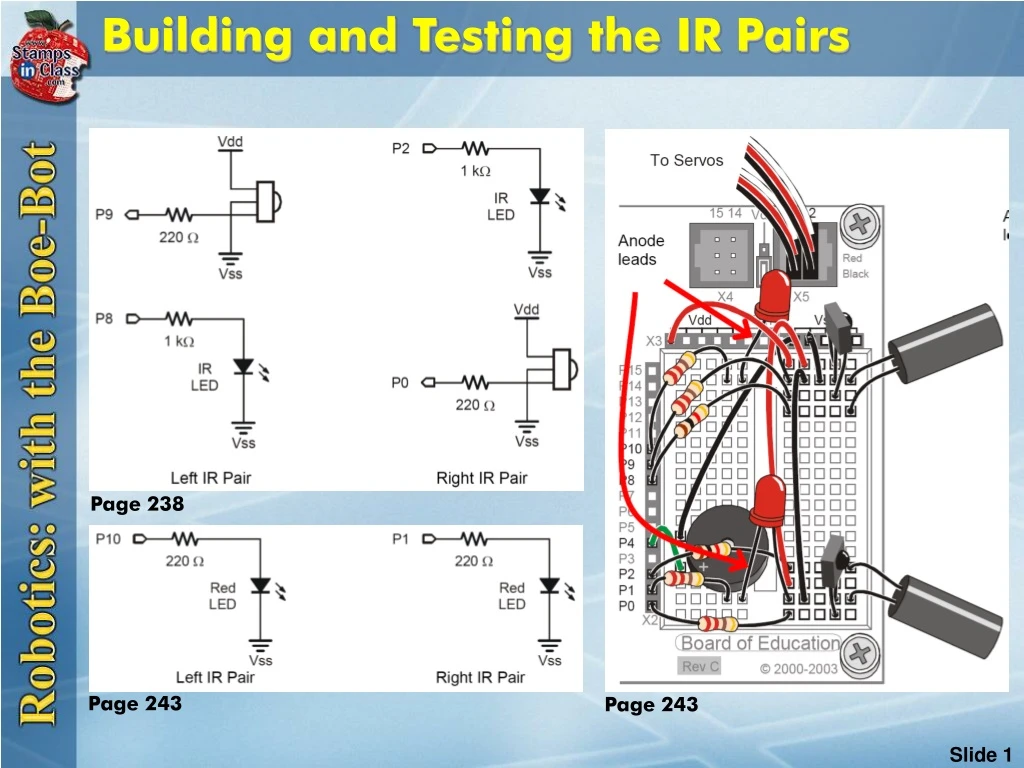
Building and Testing the IR Pairs Page 238 Page 243 Page 243
Example Program: TestIrPairsAndIndicators.bs2 Page 244 – 245
Example Program: RoamingWithIr.bs2 Page 251
Example Program: FastIrRoaming.bs2 Page 253
The Drop-off Detector Page 255
Example Program: AviodTableEdge.bs2 Page 258
Robot Control with Distance Detection Page 270 Page 271
Boe-Bot Shadow Vehicle Page 285
Proportional Control for Following Page 278 Page 279
Programming the Boe-Bot Shadow Vehicle Page 279 Page 282
Following a Stripe Page 287
Following a Stripe Page 286