Download

1 / 21
210 likes | 378 Views
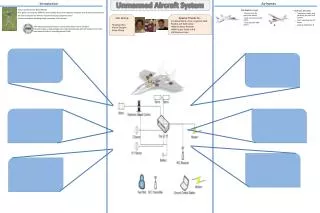
SOME Observations on regulatory pOLICY FOR UNMANNED AIRCRAFT December 2008. Tad McGeer Aerovel Corporation, White Salmon, Washington USA. TOPICS. Fundamental requirements for safety Fundamental requirements for business viability

E N D
SOME Observations on regulatory pOLICY FOR UNMANNED AIRCRAFT December 2008 Tad McGeer Aerovel Corporation, White Salmon, Washington USA
TOPICS • Fundamental requirements for safety • Fundamental requirements for business viability • Why a conventional “bins and boxes” paradigm are unsatisfactory (as illustrated by experience at Insitu) • The resulting need for a regulatory policy based on specifying acceptable risk rather than equipment and procedures
OBJECTIVES OF REGULATORY POLICY Regulations seek to limit risk of harm to those • aboard the “first party” aircraft; • aboard other aircraft; • on the ground. (1) is the main focus for manned aircraft; (2) and (3) then follow as side effects. But when (1) no longer applies, the focus must shift from the “first-party” aircraft onto what it might hit. This depends strongly on where the aircraft is flown: more reliability and certification required
UAS rules should mandate a line, a “bin/box” (in effect) mandates a point ~ $$ equipment, procedures, and size mandates ? costly forbidden location mandate
Does cost matter? • If safety is the only objective, then the regulatory solution is obvious: ground everything! • If however the objective is safely to enable applications, then getting to the right answer requires consideration of • costs • markets • business constraints • engineering design implications • Some brief observations follow…
PUTATIVE • CIVIL APPLICATIONS: • Monitoring of national infrastructure • Weather reconnaissance • Geological survey and mapping • Traffic monitoring • Forest fire monitoring • Disaster monitoring • Environmental monitoring • Search and rescue • Temporary telecommunications services Why haven’t these happened already?
What is the holdup? • Technology? • No: Many proposed applications would have been quite feasible two decades ago (when GPS became available). • Regulatory policy? • No: While policy in the US has been essentially prohibitive in the last few years (since AFS 400), this is not and has never been the situation elsewhere – notably in Canada and Australia. Policy in those countries could easily have accommodated the listed applications on a large scale.
A clue: $ … and as robotic aircraft go, Scaneagle is cheap So the correct answer is actually …
ECONOMICS! Unmanned aircraft are much too expensive to compete directly with manned aircraft. Hence viable applications are limited to those which are impractical or expensive with current techniques (e.g. offshore weather reconnaissance, remote geological survey). Markets are small. This would be the case even in a “reg-free” zone. The regulatory challenge is not to prevent cluttering the sky, but rather to avoid plugging the niches.
FEATURES OF (POSSIBLY) VIABLE APPLICATIONS(in McGeer’s humble opinion) • small aircraft (hence potentially inexpensive) • operation far beyond visual range in remote areas (hence expensive competition)
CONDITIONS FOR ACTUALLY DEVELOPING ANY APPLICATIONS Somebody must be willing to invest! • military/industrial firms are likely to be far too expensive • small markets with tight economics • small (start-up) firms with limited capital (<< $10M) • this sum must be sufficient for • engineering development including flight test • market and applications development • regulatory compliance • regulations must offer prospect of a viable market
INSITU AND THE AEROSONDE CONCEPT economic loss rate ~10-3/flt-hr 1 gm costs 1 km range 1 cm2 costs 5 km 1 W costs 10 km
SEASCAN SCANEAGLE funded entirely by private investors for private customers goodbye, civil applications …
A SOLUTION Alternate [Risk-Based] Methods of Compliance “ … If the applicant makes a safety case and presents sufficient data for an alternate means of compliance, then this data should be taken into consideration and evaluated for possible approval.” [Interim Operational Approval Guidance 08-01, FAA UAS Program Office] On the right track! Desirable additions include • explicit acceptable risk-of-harm (e.g.10-5/flt-hr) • reference to approved estimation procedure (e.g. by ASTM) • assurance that any proposed operation will be permitted or forbidden based on estimated risk
surface-collision risk example Simple, practical algorithms for estimation of midair and surface-hazard risk could be defined, encapsulated by a web site, and used for self-certification of any candidate op University of Denver plans to post such a site very soon …
PROPOSED RULE “Any UAS may be operated in such a manner that the associated risk of harm to nonparticipating persons and property is expected to be less than an acceptable threshold value as specified by the Administrator. Estimates of risk of harm shall be made according to recognised consensus standards acceptable to the Administrator.” FROM FAA UAS PROGRAM OFFICE GUIDANCE 2008: Alternate Methods of Compliance All limitations and procedures presented in this guidance document are to be considered as general guidelines only. Each application needs to be evaluated on its own technical merit based on its own set of operational parameters and proposed operational profiles, mitigations, and systems. As such, deviations and alternate methods of compliance may be approved and may differ from the information presented in this document. Therefore, if the applicant makes a safety case and presents sufficient data for an alternate means of compliance, then this data should be taken into consideration and evaluated for possible approval.
for more information … Tad McGeer. Safety, economy, reliability, and regulatory policy for unmanned aircraft. Aerovel Corporation, March 2007. (9 pp) www.aerovelco.com/papers/RoboticAircraftSafetyAndEconomy.pdf