Download
1 / 5
50 likes | 165 Views
Linearizace dynamického systému. Pro malé výchylky vstupů a stavů lze pravou stranu rovnice systému nahradit jejím úplným diferenciálem:. výchozím bodem “0” je nej častěji rovnovážný stav x 0 =x S a u 0 =u S. Jakobiho matice:.

E N D
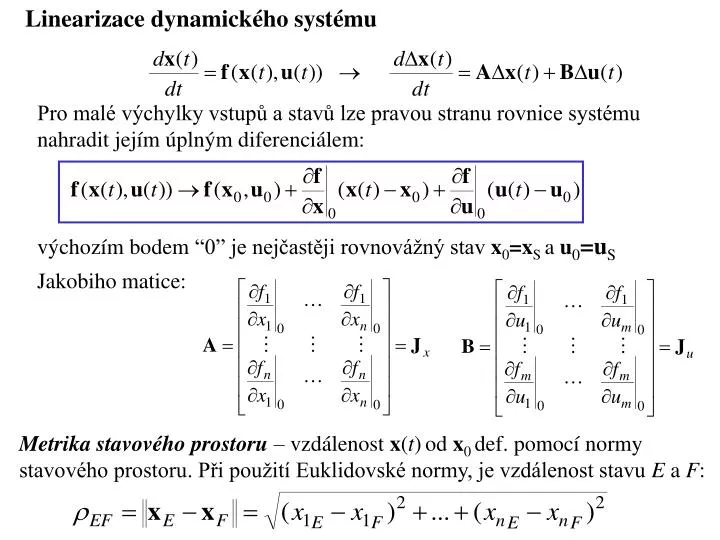
Linearizace dynamického systému Pro malé výchylky vstupů a stavů lze pravou stranu rovnice systému nahradit jejím úplným diferenciálem: výchozím bodem “0” je nejčastěji rovnovážný stav x0=xS a u0=uS Jakobiho matice: Metrika stavového prostoru – vzdálenost x(t)od x0 def. pomocí normy stavového prostoru. Při použití Euklidovské normy, je vzdálenost stavu E a F:
Rovnovážný stav nelineárního systému u(t)= uS = konst, rovnice statiky dynamického systému reálná řešení rovnicexS – souřadnice možných rovnovážných stavů systému (může být i několik rovn. stavů) zda je určitý rovnovážný stav xS stabilní je možné ověřit linearizací systému v okolí x0=xS a u0=uS a posouzením dynamiky lineárního systému
Příklad linearizace systému Van der Pole, rizika linearizace u(t) = us= konst. A=0.5 Pohyb s mezním cyklem, systém není v okolí singulárního bodustabilní asymptoticky, ale je možné jej označit za stabilní z hlediska posouzení stability dle Ljapunova.
A=0.1, reálné kořeny: