Download
1 / 138
1.42k likes | 1.68k Views
Le GRAFCET. 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche. 11 - Valeur ajoutée. 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées

E N D
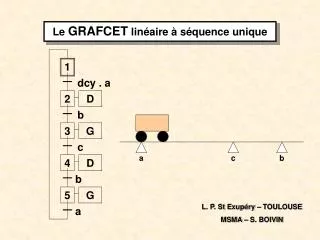
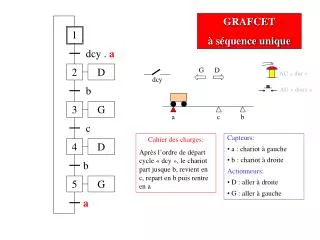
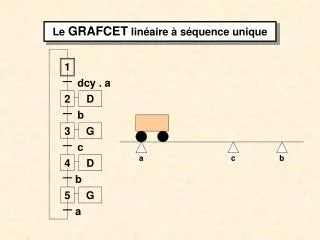
Le GRAFCET 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
11 - Valeur ajoutée 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Matière d ’œuvre Système automatisé État initial État final État final = état initial + valeur ajoutée
12 - Structure d ’un système automatisé 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche • Paramètre d ’usinage • Signaux de mise en marche • et d ’arrêt • Voyant et signalisation Partie commande • Ordre de déplacement • Changement de vitesse • Mise en marche des usinages Partie opérative
13 - Cahier des charges Description du comportement de l ’automatisme en fonction de l ’évolution de son environnement 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche • 3 niveaux : • graphe de coordination des tâches • spécification fonctionnelles • spécifications technologiques et • opérationnelles Choix des procédés opératifs Définition de la partie opérative Conception et Choix des équipements de la partie commande
14 - Le signe GRAFCET 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche GRAphe de Commande Etape Transition
15 - Niveau de représentation d ’un GRAFCET 151 - Organisation des niveaux de représentation 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche 3 points de vue : point de vue système point de vue partie opérative point de vue partie commande
15 - Niveau de représentation d ’un GRAFCET 152 - Utilisation du GRAFCET 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche GRAFCET : représentation et analyse de l ’automatisme dans son évolution séquentielle. • indépendant de la technologie de l ’automatisme • traduisant de façon cohérente le cahier des charges • autorisant les évolutions simultanées et les choix de séquences • bien adapté aux systèmes à grand nombre de variable
utilisateur Bureau d ’étude réalisateur dépanneur 21 - Processus d ’élaboration des machines automatisées 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Système automatisé CAHIER DES CHARGES GRAFCET
22 – Les différentes étapes de la réalisation d’un système automatisé 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
31- Objets manipulés par les unités de traitement ( API ) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Le traitement des informations permet de transformer des données en résultats lors de son exécution. données -------> exécution du programme -----> résultats Les données et les résultats peuvent être de différents types.
31- Objets manipulés par les unités de traitement ( API ) 311- Type bit ( Booléen ) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Une variable booléenne a l'une des deux valeurs: vrai ou faux . Exemple: proposition 1: 4 < 10 elle a la valeur vrai proposition 2: 12 < 10 elle a la valeur faux On peut rencontrer une telle variable lorsqu'on veut exprimer le test d’arrêt d'une itération ou la condition dans une instruction
31- Objets manipulés par les unités de traitement ( API ) 311- Type bit ( Booléen ) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Les opérateurs affectés aux variables booléennes sont ceux utilisés en logique : ET OU XOR NON NON ET NON OU = ≠
31- Objets manipulés par les unités de traitement ( API ) 312- Type Entier 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Les entiers peuvent être positifs ou négatifs, et on peut leur appliquer les opérations arithmétiques classiques : addition, soustraction et multiplication, notés +, - et * ainsi que les deux opérations suivantes : • La division entière, notée div, telle que n div p donne la partie entière du quotient de la division de n par p; • Le modulo, noté mod, tel que n mod p donne le reste de la division entière de n par p.
31- Objets manipulés par les unités de traitement ( API ) 312- Type Entier 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Exemple : 3+5 donnera 8 2 * (-6) donnera -12 1 2 div 3 donnera 4 1 4 div 3 donnera 4 2 div 3 donnera 0 12mod3 donnera 0 14 mod 3 donnera 2
31- Objets manipulés par les unités de traitement ( API ) 312- Type Entier 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Les entiers peuvent être affectés par les opérateurs de comparaison classiques : < > ≤ ≥ = ≠ On appellera expression entière toute expression formée à partir de variables entières, de nombres entiers, d'opérateurs, et éventuellement de parenthèses, selon les règles habituelles de l'algèbre.
31- Objets manipulés par les unités de traitement ( API ) 313- Type Réel 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Les réels peuvent être positifs ou négatifs, entiers ou non ( -3,67 ), et on peut leur appliquer les opérations arithmétiques classiques :addition, soustraction, et multiplication, notées +, - , / et *. Les réels, comme les entiers, peuvent être affectés par les opérateurs de comparaison classiques en plus des opérateurs arithmétiques classiques.
31- Objets manipulés par les unités de traitement ( API ) 314- Type Caractère 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Le type caractère est l’ensemble des caractères d’imprimerie habituels. Une variable de type caractère peut prendre toutes les valeurs de ce type. Une variable de type caractère se distingue par son écriture : elle est encadrée par deux apostrophes. Exemple : ‘O’ ‘A’ ‘n’ ‘+’ ‘3’ ‘ !’ ‘ ‘
31- Objets manipulés par les unités de traitement ( API ) 314- Type Caractère 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Un ordinateur ne pouvant manipuler que des éléments binaires, il est nécessaire de codifier les caractères, c’est-à-dire de faire correspondre à chacun d'eux une configuration binaire. Un des codes les plus utilisés est le code ASCII où un caractère est représenté par 8 bits (0 ou 1), et peut donc être interprété comme un nombre entier positif compris entre 0 et 255. Exemple: A est codifié 1000001, en décimal: 65.
31- Objets manipulés par les unités de traitement ( API ) 314- Type Caractère 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Le code ASCII respecte l'ordre alphabétique Exemple: 'A' < 'B', 'a' < 'b', mais entraîne: 'A' < 'a' Le code « unicode » est un code élargi aux caractères accentués et aux pictogrammes asiatiques
31- Objets manipulés par les unités de traitement ( API ) 315- Type Chaîne de caractères 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche L'ordinateur peut communiquer une information à l'utilisateur. Il peut soit afficher un message sur l'écran, soit imprimer un message sur papier ou envoyer une chaîne de caractère sur l’IHM (Magelis par exemple) Une chaîne de caractères est une suite quelconque de caractères, entourée d'apostrophes.
32- Déclaration des objets 321- Généralités 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche La première étape de l'analyse consiste à mettre en évidence les données du problème, objets qui seront supposés connus au départ, et les objets que l'on espère obtenir comme résultats Il faut fournir la définition précise des objets manipulés: nom des variables, nature et référentiel des valeurs (ensemble auquel les valeurs appartiennent), rôle des variables
32- Déclaration des objets 322- Exemples 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Nature Type nom-symbole commentaire Sortie Bit Pompe_1 Activation pompe 1 Entrée Bit Atu BP arrêt d'urgence Mémoire Entier Compteur_piece Nb de pièces traitées Mémoire Chaîne Message_1 Message « bonjour » Avant de démarrer l’écriture des programmes, il faudra déclarer les différents objets qui vont être manipulés par le programme. Ces objets pourront être de différents types qu’il faudra définir.
32- Déclaration des objets 323- Mémoire 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Les objets de type mémoire représentent les variables internes de la machine. Ces objets peuvent être de type bit, octet (8bit), mot (16 bit), mot double (32 bit) ou réel (32 bit). Les objets autres que bit peuvent être déclarés en « variable » ou « constante ».
32- Déclaration des objets 323- Mémoire 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Ces objets peuvent être de type mot (16 bit), mot double (32 bit)
32- Déclaration des objets 323- Mémoire 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche ou réel (32 bit).
32- Déclaration des objets 324- Entrées 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Ces objets peuvent être de type bit ou mot. Ils permettent la communication entre la machine de traitement des données et l’extérieur. Les variables de type mot seront généralement utilisées pour les entrées analogiques ou pour des entrées particulières comme les compteurs rapides.
32- Déclaration des objets 325- Sorties 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Ces objets peuvent être de type bit ou mot. Ils permettent la communication entre l’extérieur et la machine de traitement des données. Les variables de type mot seront généralement utilisées pour les sorties analogiques.
32- Déclaration des objets 326- Constante 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Le caractère constant d’un objet signifie que la valeur de cette objet a été défini lors de la programmation et que cette valeur ne peut être modifiée durant l’exécution du programme
32- Déclaration des objets 327- Tableau 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Les tableaux représentent une succession d’objets consécutifs dans la mémoire et peuvent être de tous les types. La déclaration d’un tableau se fera de la manière suivante : Type des objets du tableau Non du tableau [Taille du tableau]
32- Déclaration des objets 327- Tableau 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche L’intérêt des tableaux est de pouvoir par exemple transférer en une seule expression toute une successions de données relatives aux fonctionnement du système. Exemple : machine traitant différents types de produits, il suffit de créer un tableau par produit en y plaçant chacun des paramètres de fonctionnement et de transférer ces paramètres au début de l’élaboration de chacun de ces produits
ACTION ETAPE 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Fin course a RECEPTIVITE TRANSITION LIAISON ORIENTEE
51 - Vocabulaire 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche • ETAPE : période de réalisation d ’une action • étape active • étape initiale
51 - Vocabulaire 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche • TRANSITION : Liaison orientée qui unit • 2 étapes • transition valide: toutes les étapes précédentes sont actives • transition franchie : • la transition est valide • ET la réceptivité est vraie
51 - Vocabulaire 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche • ACTION : définit le travail des actionneurs • action inconditionnelle • exécutée dés que l ’étape correspondante est active • action conditionnelle • exécutée si l ’étape est active et si la condition associée • est vérifiée
52 - Règles d ’évolution Règle 1: l ’étape initiale est activée inconditionnellement à l ’initialisation de l ’automatisme 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Règle 2: Une transition est validée quand toutes les étapes précédentes sont actives. Une transition est franchie quand elle est validéeet si la réceptivité est vérifiée Le franchissement d ’une transition active toutes les étapes suivantes et désactives des étapes précédentes
52 - Règles d ’évolution Règle 3: Une étape est activée par le franchissement de la transition amont 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche Une étape est désactivée par la franchissement de la transition aval. L ’action associée à l ’étape est exécutable tant que l ’étape associée est active Règle 4: Deux transitions simultanément franchissable sont franchies simultanément Règle 5: Une étape simultanément activée et désactivée reste active
61 - ORDRE CONTINU 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
61 - ORDRE CONTINU 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
62 - ORDRE CONDITIONNEL 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
62 - ORDRE CONDITIONNEL 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche d=1
62 - ORDRE CONDITIONNEL 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche d=1
63 - ORDRE DE MEMORISATION DE L ’ACTION 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
63 - ORDRE DE MEMORISATION DE L ’ACTION 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche P P
63 - ORDRE DE MEMORISATION DE L ’ACTION 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche P P
63 - ORDRE DE MEMORISATION DE L ’ACTION 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche P P
63 - ORDRE DE MEMORISATION DE L ’ACTION 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche
64 - ORDRE RETARDE (D) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche t = 0
64 - ORDRE RETARDE (D) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche t = 1
64 - ORDRE RETARDE (D) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche t = 2
64 - ORDRE RETARDE (D) 1 Problème d ’automatisme 2 Généralités 3 Les variables utilisées 4 Représentation 5 Synthèse 6 Actions associées aux étapes 7 Séquences de base 8 Traitement d ’arrêt 9 Mode de marche t = 3