Download
1 / 23
230 likes | 724 Views
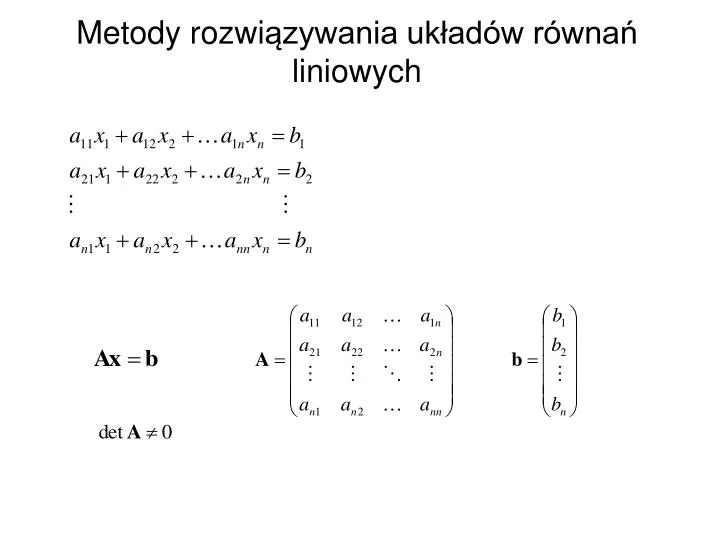
Metody rozwi ązywania układów równań liniowych. Parę słów o macierzach Macierz m ´ n : tablica m na n ( m wierszy n kolumn) liczb (np. tabliczka mnożenia). Macierz kwadradowa: m=n Macierz symetryczna (zawsze kwadratowa): a ij =a j i Macierz transponowana A T : ( A T ) ij = a ji

E N D
Parę słów o macierzach Macierz m´n: tablica m na n (m wierszy n kolumn) liczb (np. tabliczka mnożenia). Macierz kwadradowa: m=n Macierz symetryczna (zawsze kwadratowa): aij=aji Macierz transponowana AT: (AT)ij=aji Macierz nieosobliwa: macierz o niezerowym wyznaczniku. Macierz dodatnio określona: xTAx>0 dla każdego niezerowego wektora x. Norma euklidesowa macierzy: Norma spektralna macierzy Wskaźnik uwarunkowania macierzy
Metody skończone: • Metoda Gaussa • Metoda Gaussa-Jordana • Metody Choleskiego • Metoda Householdera • Metoda sprzężonych gradientów • Metody iteracyjne dla dużych układów równań: • Metoda Jacobiego • Metoda Gaussa-Seidla
Metoda eliminacji Gaussa z wyborem elementu głównego w kolumnie Układ równań sprowadzamy do postaci trójkątnej Układ z macierzą trójkątną można następnie łatwo rozwiązać zaczynając od obliczenia wartości xn z n-tego równania, następnie wstawić xn do równania n-1 i wyliczyć z niego xn-1, następnie wstawić xn oraz xn-1 do równania n-2 i wyliczyć xn-2 aż do dotarcia do równania pierwszego i wyznaczenia x1.
Wybieramy równanie i takie, że |ai1| jest największym elementem w pierwszej kolumnie po czym przestawiamy i-te równanie na początek i eliminujemy x1 z równań od 2 do n. • Procedurę powtarzamy z macierzą A(1) o rozmiarach (n-1)x(n-1) i wektorem b(1) o rozmiarze n-1, eliminując z nich drugą zmienną i otrzymując macierz A(2) o rozmiarach (n-2)x(n-2) i wektor b(2) o rozmiarze n-2. W ten sam sposób postępujemy z kolejnymi macierzami A(2), A(3),..., A(n-1) oraz wektorami b(2), b(3),..., b(n-1).
Dla j-tego kroku Po zakończeniu operacji otrzymujemy układ równań z macierzą trójkątną p jest liczbą przestawień wierszy macierzy A podczas sprowadzania układu równań do postaci trójkątnej.
Z otrzymanego układu równań z macierzą trójkątną wyznaczamy po kolei xn, xn-1,..., x1. Wysiłek obliczeniowy (liczba mnożeń i dzieleń) w metodzie eliminacji Gaussa: Faktoryzacja macierzy A: n(n2-1)/3 operacji Przekształcenie wektora b: n(n-1)/2 operacji Obliczenie x: n(n+1)/2 operacji. Razem: n3/3+n2-n/3≈n3/3 operacji. Kod źródłowy metody eliminacji Gaussa.
Zastosowania metody eliminacji Gaussa i innych metod rozwiązywania układów równań liniowych. 1. Odwracanie macierzy Należy więc jednocześnie rozwiązać n układów równań z wektorami jednostkowymi poszczególnych osi w przestrzeni n-wymiarowej jako wyrazami wolnymi. Wszystkie wektory wyrazów wolnych przekształca się jednocześnie w czasie faktoryzacji macierzy A. Koszt obliczeniowy operacji wynosi (4/3)n3-n/3 operacji.
2. Mnożenie macierzy przez macierz odwrotną Jeżeli macierz A ma rozmiar nxn to macierz B musi mieć n wierszy (liczba kolumn może być dowolna, np. m). Zagadnienie sprowadza się do jednoczesnego rozwiązania m układów równań liniowych, których wektory wyrazów wolnych są równe kolejnym kolumnom macierzy B. Podobie jak przy odwracaniu macierzy podczas faktoryzacji A jednocześnie przekształcamy wszystkie kolumny macierzy B. Wysiłek obliczeniowy wynosi n3/3-n/3+mn2 operacji.
Metoda Gaussa-Jordana W odróżnieniu od metody eliminacji Gaussa eliminujemy poszczególne zmienne nie tylko z równań następujących po danym równaniu ale również z równań je poprzedzających. W wyniku tej operacji końcowy układ równań ma postać diagonalną a w kroku j-1 ma on następującą postać:
Dla dużych n metoda Gaussa-Jordana wymaga ok. n3/2 operacji.
Metody typu Choleskiego dla macierzy symetrycznych silnie nieosobliwych LT D L L klasyczna metoda Choleskiego tylko dla macierzy dodatnio określonych.
Postępowanie przy rozwiązywaniu układów równań metodą faktoryzacji Choleskiego. • Wyznaczenie faktorów L i D. Układ przyjmuje postać • LDLTx=b • 2. Obliczenie pomocniczego wektora w. • w=L-1b przez rozwiązanie układu równań Lw=b. • Ponieważ L jest macierzą trójkątną dolną układ ten rozwiązuje się wyliczając kolejno w1, w2,…, wn podobnie jak w koncowym etapie eliminacji Gaussa. • 3. Obliczenie z=D-1w (D jest macierzą diagonalną więc po prostu dzielimy wi przez dii. Ten etap nie występuje w klasycznej metodzie Choleskiego. • 4. Obliczenie x poprzez rozwiązanie układu równań z macierzą trójkątną górną • LTx=z • Ten etap jest identyczny z ostatnim etapem metody eliminacji Gaussa. • Metoda wymaga ok. n3/6 operacji (2 razy mniej niż metoda eliminacji Gaussa). Uwaga: klasyczna metoda Choleskiego wymaga ponadto n pierwiastkowań.
Iteracyjna poprawa rozwiązania układu równań liniowych Proces kończymy gdy
Metoda sprzężonych gradientów Rozwiązanie układu równań przedstawiamy jako rozwiązanie zagadnienia minimalizacji funkcji E(x), której gradient jest różnicą pomiędzy lewą a prawą stroną układu równań. Metoda polega na wykonaniu n kroków w kierunkach d0, d1,…, dn-1 stopniowo zbliżających się do kierunku jednej z osi hiperparaboloidy E(x); długość kroku w każdym kierunku jest tak dobrana aby zlokalizować minimum E na tym właśnie kierunku. Poszczególne kierunki są A-ortogonalne, tj. dk+1Adk=0
Wybieramy punkt startowy x0. Obliczamy d0=-g0=b-Ax0. Jeżeli g0=0 procedura jest zakończona. • W kroku k=0,1,…,n-1 obliczamy Wstawiamy xk+1=xk+akdk Wstawiamy gk+1=gk+akAdk. Jeżeli ||gk+|||<e kończymy proces, w przeciwnym wypadku wstawiamy a następnie wstawiamy dk+1=-gk+1+bkdk Procedura jest teoretycznie zawsze zbieżna w n krokach (0,1,…,n-1). Dla dobrze uwarunkowanego zadania zbieżność jest szybsza a dla źle uwarunkowanego zadania często występują oscylacje. Kod źródłowy metody sprzężonych gradientów.
Metody iteracji Jacobiego oraz iteracji Gaussa-Seidla • Metody te stosuje się dla dużych układów równań, pojawiających się przykładowo przy rozwiązywaniu równań różniczkowych cząstkowych lub równań całkowych. • Iteracja Jacobiego • Wyznaczamy przybliżenie początkowe x(0) • Kolejne przybliżenia x(1), x(2),…, obliczamy wyznaczając xi z i-tego równania dla i=1,2,…,n a następnie podstawiając po prawej stronie poprzednie przybliżenie x. 3. Proces kończymy jeżeli ||x(p+1)-x(p)||<d.
Metoda iteracji Gaussa-Seidla. Metoda ta różni się od metody iteracji Jacobiego tym, że kolejne przybliżenie i-tej współrzędnej wektora x obliczamy wykorzystując przybliżenia x1,…,xi-1 wyliczone w aktualnej iteracji oraz przybliżenia xi+1,…,xn z poprzedniej iteracji. Metoda iteracji Gaussa-Seidla jest zawsze zbieżna dla macierzy dodatnio określonych.
Optymalna wartość czynnika relaksacji; l1 jest największą wartością własną macierzy B=B(l)+B(r) Wartość czynnika relaksacji łatwa do obliczenia. Kod źródłowy metody Gaussa-Seidla.