Download
1 / 22
220 likes | 557 Views
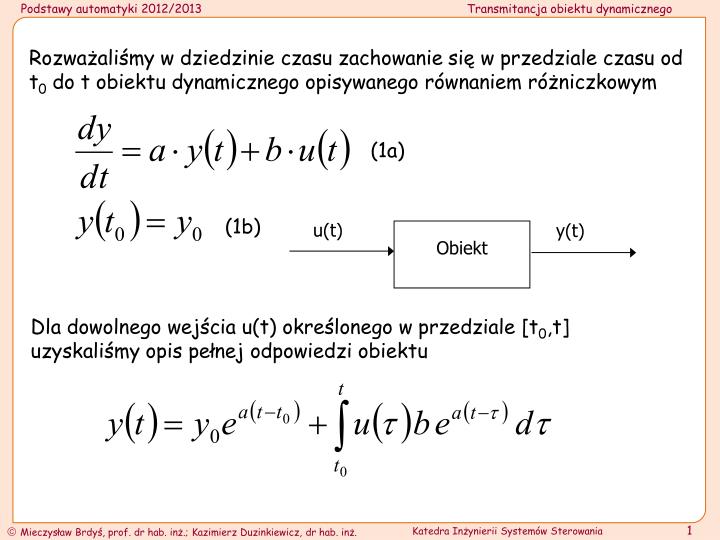
Rozważaliśmy w dziedzinie czasu zachowanie się w przedziale czasu od t 0 do t obiektu dynamicznego opisywanego równaniem różniczkowym. (1a). (1b). u(t). y(t). Obiekt. Dla dowolnego wejścia u(t) określonego w przedziale [t 0 ,t] uzyskaliśmy opis pełnej odpowiedzi obiektu.

E N D
Rozważaliśmy w dziedzinie czasu zachowanie się w przedziale czasu od t0 do t obiektu dynamicznego opisywanego równaniem różniczkowym (1a) (1b) u(t) y(t) Obiekt Dla dowolnego wejścia u(t) określonego w przedziale [t0,t] uzyskaliśmy opis pełnej odpowiedzi obiektu
Dokonamy przejścia do dziedziny zmiennej zespolonej s Załóżmy, że zarówno funkcja u(t) – wejście, jak i y(t) – wyjście, spełnia warunki pozwalające poddać je przekształceniu Laplace’a Poddając transformacji Laplace’a obydwie strony (1a) i uwzględniając znajomość (1b) otrzymamy (2)
Rozwiązując (2) ze względu na Y(s) Składowa swobodna odpowiedzi Składowa wymuszona odpowiedzi Składowa swobodna: Składowa wymuszona:
Transformata Laplace’a składowej wymuszonej: gdzie, - transmitancja obiektu dynamicznego I definicja transmitancji obiektu dynamicznego Transmitancją obiektu dynamicznego (liniowego, stacjonarnego) nazywamy stosunek transformaty Laplace’a składowej wymuszonej odpowiedzi tego obiektu na wymuszenie do transformaty Laplace’a tego wymuszenia lub inaczej: Transmitancją obiektu dynamicznego (liniowego, stacjonarnego) nazywamy stosunek transformaty Laplace’a odpowiedzi tego obiektu na wymuszenie uzyskanej przy zerowym warunku początkowym, do transformaty Laplace’a tego wymuszenia
Transmitancja obiektu dynamicznego – na przykładzie obiektu rzędu pierwszego, np. czwórnika RC, dwójnika RL Właściwości: (i) G(s) – wzmocnienie dynamiczne obiektu w dziedzinie s (ii) G(s) – nie ma stałej wartości, lecz jest funkcją zmiennej s (iii) G(s) – nie zależy od sygnału wejściowego – jest zatem charakterystyką obiektu
Transmitancja obiektu opisuje dynamikę obiektu w dziedzinie zmiennej zespolonej s Odpowiedź impulsowa obiektu opisuje dynamikę obiektu w dziedzinie czasu t Związek pomiędzy nimi? Transformata Laplace’a impulsu jednostkowego:
Otrzymaliśmy: lub Składowa wymuszona odpowiedzi na impuls jednostkowy Transmitancja obiektu dynamicznego II definicja transmitancji obiektu dynamicznego Transmitancją obiektu dynamicznego (liniowego, stacjonarnego) nazywamy transformatę Laplace’a składowej wymuszonej odpowiedzi tego obiektu na wymuszenie impulsem jednostkowym
W rozważanym przykładzie – obiekt pierwszego rzędu - odpowiedź dla i intensywności S Dla t0 = 0 i S = 1: Otrzymamy: (porównać z wynikami z poprzednich slajdów)
Odpowiedź wymuszona na sygnał skokowy o amplitudzie dla t0 =0: Odpowiedź wymuszona w dziedzinie s:
Odpowiedź wymuszona w dziedzinie t: Zastosujemy dla znalezienia L-1 metodę rozkładu na ułamki proste:
Parametry transmitancji obiektu rzędu pierwszego inercyjnego dla rozważanego przykładu Wielkość nazywamy statycznym współczynnikiem wzmocnienia
Przykład 2 – dwójnik RL Przykład 1 – czwórnik RC
Określanie wzmocnienia statycznego – wykorzystanie transmitancji - wzmocnienie statyczne
Transmitancja pozwala łatwo wyznaczyć K Odpowiedź operatorowa obiektu Dla wymuszenia skokowego o amplitudzie A: Skorzystamy z twierdzenia o wartości granicznej w dziedzinie czasu Zatem:
oraz Przykład 3 Wyznaczyć wzmocnienie statyczne obiektu o transmitancji W dziedzinie czasu opis równaniem różniczkowym:
W dziedzinie czasu należałoby teraz rozwiązać równanie różniczkowe dla wymuszenia Mając y(t) należałoby obliczyć i ostatecznie wyznaczyć K Korzystając z transmitancji: Dla np. A = 3 odpowiedź ustalona:
Przedstawmy odpowiedź wymuszoną: dla rozważanego przykładu Wielkość - nazywamy stałą czasową bezwładności (inercji) Policzmy:
Podsumowanie: W automatyce wyróżniamy pewne tzw. człony elementarne liniowe i stacjonarne, stanowiące części obiektu sterowanego lub układu sterującego charakteryzujące się określoną transmitancją operatorową Poznaliśmy już jeden z takich członów: Przykład 1 – czwórnik RC Przykład 2 – dwójnik RL
Standardowa postać transmitancji tych układów: Parametry: - współczynnik wzmocnienia statycznego - stała czasowa bezwładności Nazwa członu: Człon inercyjny pierwszego rzędu Inne człony poznamy w dalszej części wykładu !