Download
1 / 7
70 likes | 209 Views
Seafloor Sounding in Polar and Remote Regions (SSPARR) Concept. Fulfills need for seafloor depth measurements in areas not visited by ships, such as: Arctic Ocean Southern Ocean Southern Pacific and Indian Oceans NSF funded prototype

E N D
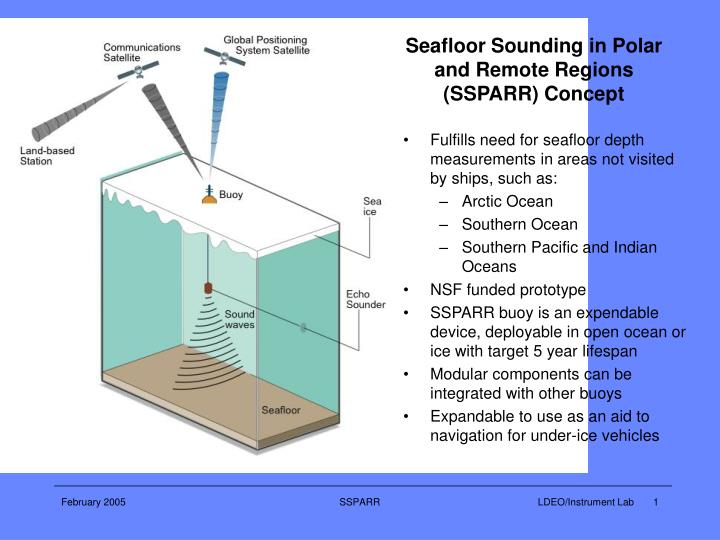
Seafloor Sounding in Polar and Remote Regions (SSPARR) Concept • Fulfills need for seafloor depth measurements in areas not visited by ships, such as: • Arctic Ocean • Southern Ocean • Southern Pacific and Indian Oceans • NSF funded prototype • SSPARR buoy is an expendable device, deployable in open ocean or ice with target 5 year lifespan • Modular components can be integrated with other buoys • Expandable to use as an aid to navigation for under-ice vehicles SSPARR
Modular System Concept SSPARR
Seafloor Sounding in Polar and Remote Regions (SSPARR) • Buoy Control/Telemetry Module • Iridium Short Burst Data • Data Acquisition/Archiving & Control Sys. • May be floating or through-ice • Electromechanical Tether • Oil-filled hydraulic hose protects from ice damage • Integral electrical conductors • Depth Sounder Module • Nominal 20m depth to reduce ice damage, surface bubbles, cavitation • Internal power supply for 5 year lifetime • Energy output dependent on expected seafloor depth SSPARR
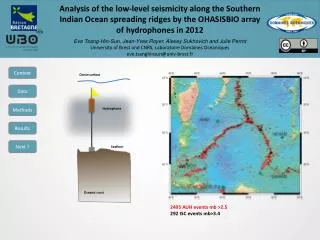
Preliminary Data Sample SSPARR
Moving Average First Difference Bottom Detection Algorithm of TracEd System, Dijkstra, S.J., Software Tools Developed for Seafloor Classification, PhD Dissertation, University of New Brunswick, Fredericton, NB Canada, November 1999 Detected Bottom ITC 3013 Transducer 197dB Source Level 2150m Water Depth SSPARR
Contacts • Bob Anderson, SAIC andersonrm@saic.com • Dale Chayes, LDEO dale@ldeo.columbia.edu • Mark Rognstad, HMRG/UH markr@soest.hawaii.edu • Larry Mayer, UNHlarry.mayer@unh.edu SSPARR