Download
1 / 1
10 likes | 192 Views
Phase Plane Analysis of Battery Series Balancing on Robo t Yu-Chang Chang , Sheng Chen, and Chih-Chen Chen Department of Vehicle Engineering, National Taipei University of Technology, Taipei, Taiwan, R.O.C senchen@cc.hwh.edu.tw. 3.Experimental Results ( 實驗結果 )

E N D
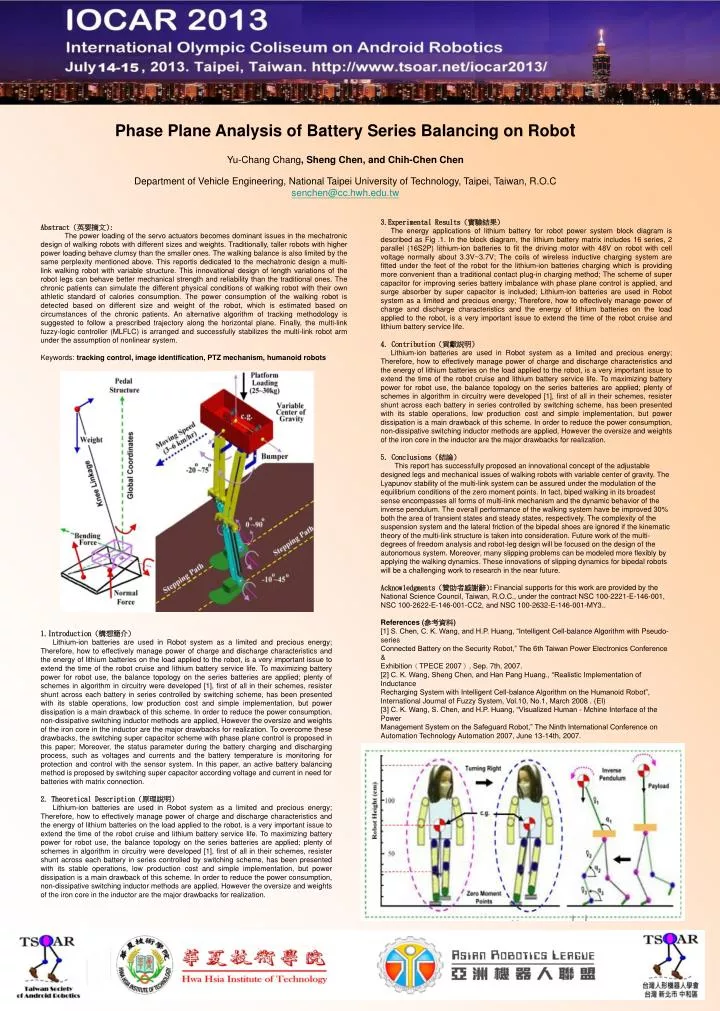
Phase Plane Analysis of Battery Series Balancing on Robot Yu-Chang Chang, Sheng Chen, and Chih-Chen Chen Department of Vehicle Engineering, National Taipei University of Technology, Taipei, Taiwan, R.O.C senchen@cc.hwh.edu.tw 3.Experimental Results (實驗結果) The energy applications of lithium battery for robot power system block diagram is described as Fig .1. In the block diagram, the lithium battery matrix includes 16 series, 2 parallel (16S2P) lithium-ion batteries to fit the driving motor with 48V on robot with cell voltage normally about 3.3V~3.7V; The coils of wireless inductive charging system are fitted under the feet of the robot for the lithium-ion batteries charging which is providing more convenient than a traditional contact plug-in charging method; The scheme of super capacitor for improving series battery imbalance with phase plane control is applied, and surge absorber by super capacitor is included; Lithium-ion batteries are used in Robot system as a limited and precious energy; Therefore, how to effectively manage power of charge and discharge characteristics and the energy of lithium batteries on the load applied to the robot, is a very important issue to extend the time of the robot cruise and lithium battery service life. 4. Contribution (貢獻說明) Lithium-ion batteries are used in Robot system as a limited and precious energy; Therefore, how to effectively manage power of charge and discharge characteristics and the energy of lithium batteries on the load applied to the robot, is a very important issue to extend the time of the robot cruise and lithium battery service life. To maximizing battery power for robot use, the balance topology on the series batteries are applied; plenty of schemes in algorithm in circuitry were developed [1], first of all in their schemes, resister shunt across each battery in series controlled by switching scheme, has been presented with its stable operations, low production cost and simple implementation, but power dissipation is a main drawback of this scheme. In order to reduce the power consumption, non-dissipative switching inductor methods are applied, However the oversize and weights of the iron core in the inductor are the major drawbacks for realization. 5. Conclusions (結論) This report has successfully proposed an innovational concept of the adjustable designed legs and mechanical issues of walking robots with variable center of gravity. The Lyapunov stability of the multi-link system can be assured under the modulation of the equilibrium conditions of the zero moment points. In fact, biped walking in its broadest sense encompasses all forms of multi-link mechanism and the dynamic behavior of the inverse pendulum. The overall performance of the walking system have be improved 30% both the area of transient states and steady states, respectively. The complexity of the suspension system and the lateral friction of the bipedal shoes are ignored if the kinematic theory of the multi-link structure is taken into consideration. Future work of the multi-degrees of freedom analysis and robot-leg design will be focused on the design of the autonomous system. Moreover, many slipping problems can be modeled more flexibly by applying the walking dynamics. These innovations of slipping dynamics for bipedal robots will be a challenging work to research in the near future. Acknowledgments (贊助者感謝辭): Financial supports for this work are provided by the National Science Council, Taiwan, R.O.C., under the contract NSC 100-2221-E-146-001, NSC 100-2622-E-146-001-CC2, and NSC 100-2632-E-146-001-MY3.. References (參考資料) [1] S. Chen, C. K. Wang, and H.P. Huang, “Intelligent Cell-balance Algorithm with Pseudo-series Connected Battery on the Security Robot,” The 6th Taiwan Power Electronics Conference & Exhibition(TPECE 2007), Sep. 7th, 2007. [2] C. K. Wang, Sheng Chen, and Han Pang Huang., “Realistic Implementation of Inductance Recharging System with Intelligent Cell-balance Algorithm on the Humanoid Robot”, International Journal of Fuzzy System, Vol.10, No.1, March 2008 . (EI) [3] C. K. Wang, S. Chen, and H.P. Huang, “Visualized Human - Mchine Interface of the Power Management System on the Safeguard Robot,” The Ninth International Conference on Automation Technology Automation 2007, June 13-14th, 2007. Abstract (英文摘要): The power loading of the servo actuators becomes dominant issues in the mechatronic design of walking robots with different sizes and weights. Traditionally, taller robots with higher power loading behave clumsy than the smaller ones. The walking balance is also limited by the same perplexity mentioned above. This reportis dedicated to the mechatronic design a multi-link walking robot with variable structure. This innovational design of length variations of the robot legs can behave better mechanical strength and reliability than the traditional ones. The chronic patients can simulate the different physical conditions of walking robot with their own athletic standard of calories consumption. The power consumption of the walking robot is detected based on different size and weight of the robot, which is estimated based on circumstances of the chronic patients. An alternative algorithm of tracking methodology is suggested to follow a prescribed trajectory along the horizontal plane. Finally, the multi-link fuzzy-logic controller (MLFLC) is arranged and successfully stabilizes the multi-link robot arm under the assumption of nonlinear system. Keywords: tracking control, image identification, PTZ mechanism, humanoid robots 1.Introduction (構想簡介) Lithium-ion batteries are used in Robot system as a limited and precious energy; Therefore, how to effectively manage power of charge and discharge characteristics and the energy of lithium batteries on the load applied to the robot, is a very important issue to extend the time of the robot cruise and lithium battery service life. To maximizing battery power for robot use, the balance topology on the series batteries are applied; plenty of schemes in algorithm in circuitry were developed [1], first of all in their schemes, resister shunt across each battery in series controlled by switching scheme, has been presented with its stable operations, low production cost and simple implementation, but power dissipation is a main drawback of this scheme. In order to reduce the power consumption, non-dissipative switching inductor methods are applied, However the oversize and weights of the iron core in the inductor are the major drawbacks for realization. To overcome these drawbacks, the switching super capacitor scheme with phase plane control is proposed in this paper; Moreover, the status parameter during the battery charging and discharging process, such as voltages and currents and the battery temperature is monitoring for protection and control with the sensor system. In this paper, an active battery balancing method is proposed by switching super capacitor according voltage and current in need for batteries with matrix connection. 2. Theoretical Description (原理說明) Lithium-ion batteries are used in Robot system as a limited and precious energy; Therefore, how to effectively manage power of charge and discharge characteristics and the energy of lithium batteries on the load applied to the robot, is a very important issue to extend the time of the robot cruise and lithium battery service life. To maximizing battery power for robot use, the balance topology on the series batteries are applied; plenty of schemes in algorithm in circuitry were developed [1], first of all in their schemes, resister shunt across each battery in series controlled by switching scheme, has been presented with its stable operations, low production cost and simple implementation, but power dissipation is a main drawback of this scheme. In order to reduce the power consumption, non-dissipative switching inductor methods are applied, However the oversize and weights of the iron core in the inductor are the major drawbacks for realization.