Download
1 / 26
260 likes | 428 Views
Touch Everywhere. 國立中正大學資訊工程學系 指導老師:劉興民 教授 高仲毅、林澤宏、林義嵐、萬怡恩. 起源. 你還在為螢幕的尺寸所困擾嗎?. 如果,有一台裝置能滿足我在每種大小螢幕的應用,就好了。. 於是. 第一代 The Toucher 誕生. 這是一台具備 大尺寸投影機 深度感測裝置 最新操作系統 高 1.5m 重 40kg 的多功能智慧裝置。. 你可以試著想像一下. 有一天, The Toucher 可以放在你的肩膀上。. 所以,滿足了你所有的需求.

E N D
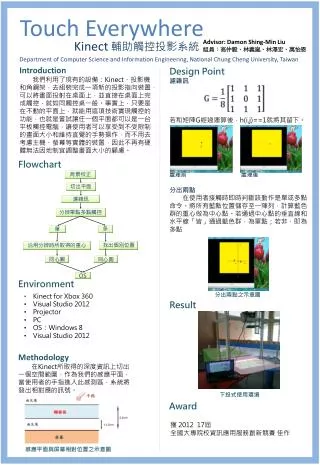
Touch Everywhere 國立中正大學資訊工程學系 指導老師:劉興民 教授 高仲毅、林澤宏、林義嵐、萬怡恩
如果,有一台裝置能滿足我在每種大小螢幕的應用,就好了。如果,有一台裝置能滿足我在每種大小螢幕的應用,就好了。
於是 第一代The Toucher誕生
這是一台具備 • 大尺寸投影機 • 深度感測裝置 • 最新操作系統 • 高1.5m • 重40kg 的多功能智慧裝置。 你可以試著想像一下
使用實驗室的設備和容易取得的材料,組裝出我們的雛型機。使用實驗室的設備和容易取得的材料,組裝出我們的雛型機。 • 使用我們自己的演算法,找出兩隻手的手指。 • 自動偵測畫面大小,以配合操作。 • 在凹凸不平的表面上也能操作。 • 克服硬體偵測時,雜訊干擾的問題。 Our work
在Kinect所取得的深度資訊上切出一個空間範圍,作為我們的感應平面,當使用者的手指進入此感測區,系統將發出相對應的訊號。在Kinect所取得的深度資訊上切出一個空間範圍,作為我們的感應平面,當使用者的手指進入此感測區,系統將發出相對應的訊號。 Methodology 感應平面與屏幕相對位置之示意圖
利用Kinect前十次所取得的深度資訊(前十個frame)來建立出一個背景平面,此平面做為未來背景深度的依據,藉由這方法可以使我們在任何地方都可以讓Kinect的偵測平面落在背景上。(Demo)利用Kinect前十次所取得的深度資訊(前十個frame)來建立出一個背景平面,此平面做為未來背景深度的依據,藉由這方法可以使我們在任何地方都可以讓Kinect的偵測平面落在背景上。(Demo) 自動背景校正 處理前 處理後
公式: • 若和矩陣G經過運算後,h(i,j)==1就將其留下。 濾雜訊 處理前 處理後
公式: • 若和矩陣G經過運算後,h(i,j)==1就將其留下。 濾雜訊 處理前 處理後
在使用者接觸時即時判斷該動作是單或多點命令。將所有藍點位置儲存至一陣列,計算藍色群的重心做為中心點。若通過中心點的垂直線和水平線「皆」通過藍色群,為單點;若非,即為多點。在使用者接觸時即時判斷該動作是單或多點命令。將所有藍點位置儲存至一陣列,計算藍色群的重心做為中心點。若通過中心點的垂直線和水平線「皆」通過藍色群,為單點;若非,即為多點。 分出單多點
在使用者接觸時即時判斷該動作是單或多點命令。將所有藍點位置儲存至一陣列,計算藍色群的重心做為中心點。若通過中心點的垂直線和水平線「皆」通過藍色群,為單點;若非,即為多點。在使用者接觸時即時判斷該動作是單或多點命令。將所有藍點位置儲存至一陣列,計算藍色群的重心做為中心點。若通過中心點的垂直線和水平線「皆」通過藍色群,為單點;若非,即為多點。 分出兩點
為了更加穩定手指位置而構思出此方式。未加這個演算法時,手指位置振動幅度大。而此方法則是比對上一次位置,若這次點落在小同心圓內,則歸納跟上次同一個點,若在大圓外,則是雜訊,也歸納跟上次同一個點,亦即有效更新點則若在大小圓之間。這個方式有效穩定手指訊號。(影片)為了更加穩定手指位置而構思出此方式。未加這個演算法時,手指位置振動幅度大。而此方法則是比對上一次位置,若這次點落在小同心圓內,則歸納跟上次同一個點,若在大圓外,則是雜訊,也歸納跟上次同一個點,亦即有效更新點則若在大小圓之間。這個方式有效穩定手指訊號。(影片) (外) 同心圓 (裡)
為了克服投影表面凹凸不平的狀況,紀錄kinect第一次所取得的每一個座標點的深度值,建立出反應該深度值的觸控表面。(影片:手機、地球儀)為了克服投影表面凹凸不平的狀況,紀錄kinect第一次所取得的每一個座標點的深度值,建立出反應該深度值的觸控表面。(影片:手機、地球儀) 凹凸表面自動適應
背景校正 切出平面 濾雜訊 分辨單點多點觸控 多 單 找出個別位置 沿用分辨時所取得的重心 同心圓 同心圓 OS 程式執行流程
基本動作(動態磚): • Tap • Hold • Drag • Zoom In/Zoom Out • Rotate • 切繩子 • 畫畫 實際操作
目前已完成作業系統提供大部分的觸控手勢。 • 目前經過測試,在牆面、桌面和一些不平整平面上可以完成操作。 • 目前我們的系統已可以完成某些應用程式的操作需求。 結論
硬體體積較大 • Kinect偵測距離、紅外線測距精準度 • Kinect解析度問題 尚待克服的問題
組長:高仲毅:統整規劃、Schedule規劃 • 組員:林澤宏:Configuration、數據紀錄和整理 • 林義嵐:文件、海報、投影片、影片整理 • 萬怡恩:比賽統籌規劃、開會紀錄 成員分工
The End. 感謝您的聆聽