Download
1 / 38
• 380 likes • 517 Views
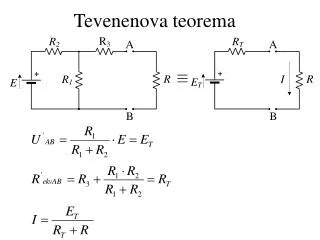
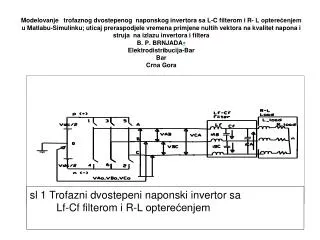
sl 1 Trofazni dvostepeni naponski invertor sa Lf-Cf filterom i R-L opterećenjem.

E N D
sl 1 Trofazni dvostepeni naponski invertor sa Lf-Cf filterom i R-L opterećenjem Modelovanje trofaznog dvostepenog naponskog invertora sa L-C filterom i R- L opterećenjem u Matlabu-Simulinku; uticaj preraspodjele vremena primjene nultih vektora na kvalitet napona i struja na izlazu invertora i filteraB. P. BRNJADAElektrodistribucija-BarBarCrna Gora
2. Invertor i el. kolo koje se analizira Iz slike se vide osnovne karakteristike dvostepenog naponskog invertora. Invertor ima izvor napona koji može biti baterija ili snažan kondenzator, koji je podijeljen zajedničkom tačkom “0” na dva jednaka dijela koji su nekada predstavljeni sa Vdc a ponekad sa Vdc/2 ali to ne mijenja suštinu. Izvor je vezan za p(+) i n(-) sabirnicu. Invertor takođe ima tri grane sa po dvije komutacione ćelije u svakoj grani. Svaka komutaciona ćelija se sastoji iz kontrolisanog prekidačkog elementa (elemenat sa prisilnom komutacijom) IGBT i antiparalelne diode. Dioda u ovoj komutacionoj ćeliji ima ulogu tzv. “freewheeling diode”, tj. daje mogućnost neometane cirkulacije reaktivne struje i snage između izvora i potrošača, Iz prethodne rečenice se vidi da se kod naponskog invertora oblikuje izlazni napon dok struja normalno i neometano cirkuliše zahvaljujući antiparalelnoj diodi.. Na kraju, imamo i Lf-Cf filter i R-L potrošač koji može biti vezan u zvijezdu (kao u razmatranom slučaju) i u trougao.
3. Matematički model za dato el. kolo koje sadrži izvor, invertor i Lf-Cf filter sa R- L opterećenjem Matematičko modelovanje invertora [1], [2] je moguće i na osnovu sledećih relacija za medjufazne napone: Prethodne relacije se u matričnoj formi mogu zapisati na sledeći način: Ove relacije se koristite za modelovanje invertora u Matlabu-Simulinku kao na sl 2 .
sl 2 Trofazni dvostepeni invertor ; realizacija matrične jednačine (1) 3. Matematički model za dato el. kolo koje sadrži izvor, invertor i Lf-Cf filter sa R- L opterećenjem
sl 3 Lf-Cf filter i R-L opterećenje 3. Matematički model za dato el. kolo koje sadrži izvor, invertor i Lf-Cf filter sa R- L opterećenjem
3. Matematički model za dato el. kolo koje sadrži izvor, invertor i Lf-Cf filter sa R- L opterećenjem Za modelovanje filtera i opterećenja za svaku fazu, s obzirom na simetričnost opterećenja, koristi se ista grupa jednačina (2) ( koja se dobija na osnovu Kirhofovih jednačina za čvorove i petlje prema sl 3. : Grupa jednačina (2), koja daje matematički model faze “A”, predstavljena je na sl 4 i sl 5 modelom u Matlabu-Simulinku. Sve faze su, po matematičkoj formi, identične pa se zato identično modeluju.
sl 5 Model jedne faze Lf-Cf filtera sa R-L opterećenjem predstavljena jednačinama (2) sl 4 Model jedne faze opterećenja 3. Matematički model za dato el. kolo koje sadrži izvor, invertor i Lf-Cf filter sa R- L opterećenjem
4. Upravljanje invertorom Upravljački naponi na invertoru su idealnih kosinusoidalnih (ili sinusoidalni) naponi upravo onakvi kakve želimo da dobijemo na izlazu invertora. Oni su dati sledećm jednačinama Pomoću odgovarajućeg modela upravljanja [3] iz idealnih napona dobijamo upravljačke napone na ulazu invertora. Ti upravljački naponi prate promjenu znaka idealnih napona i poluperioda kada im je amplituda jedinica je PI (rad) a kada su jednaki nuli preostalih PI (rad) do pune periode. Na taj način kao medjufazne napone na izlazu invertora dobijamo pravougaone forme širine 2*PI/3 (rad) a periode 2*PI.Osnovni harmonici međufaznih napona su fazno pomjereni za po 2*PI/3 .
4. Upravljanje invertorom Pomoću faznih napona možemo definisati prostorni vektor sledećom relacijom: U opštem slučaju simetričnih faznih napona bilo kakve forme prostorni vektor se može predstaviti pomoću komponenata u nepokretnom referentnom sistemu pomoću matrične jednačine: Kada na sistem faznih napona (3) primijenimo matričnu jednačinu (5) dobijamo direktnu Vd i poprečnu Vq komponentu prostornog vektora Vs . Treba da se zamijeni sa :Kada na izlazne fazne napone invertora primijenimo jednačinu (4) ili matričnu jednačinu (5) dobijamo direktnu i poprečnu komponentu prostornog vektora Vs .
sl 6 Heksagon, prostorni vektor u d-q koordinatama 4. Upravljanje invertorom Kada se Vd i Vq prikažu u d-q referentnom sistemu dobijamo heksagon, prikazan na sl 6, kao trajektoriju prostornog vektora . Tjemena heksagona su 2*Vdc/3, dok je najveća vrednost amplitude referentnog napona, pod uslovom da želimo rad u oblasti linearnosti, jednaka poluprečniku kruga upisanog u heksagon pa iznosi: Ovo je istovremeno i granična vrijednost amplitude sinusoidalnog napona kod rada u linearnom području. Amplituda osnovnog harmonika pravougaone forme je pa je stepen iskorištenja napona:
4. Upravljanje invertorom Kada invertor treba da služi za napajanje motora tada je važno da tzv Volt-sec karakteristika , odnosno da napajanje motora prati promjenu ulančenog fluksa (magnetsko obuhvatanje). Naime ako zanemarimo impedansu statora, ili koristimo “Г” ekvivalentnu shemu indukcionog motora, dolazimo do činjenice da jenapona napajanja direktno proporcionalan indukovanoj ems-i, odnosno magnetskom obuhvatanju motora koji treba održati konstantnim. Kao rješenje se nameće podjela jedne periode na šest sektora (n=1,2,...,6) od kojih se svaki dijeli na jednaki broj vremenskih intervala(sekcija) Ts u toku kojih se Vref može smatrati konstantnim.Ukupan broj vremenskih intervala dat je frekvencijom uzorkovanja Fs =1/Ts (“sampling frequency”). S obzirom da rotira brzinom “w” sintezu Vref vršimo na osnovu dva vektora Vn i Vn+1 n=1,...,6 koji ograničavaju sektor u kome se Vref u posmatranom trenutku nađe i odgovarajućihvremena Tn i Tn+1. Uzimajući u obzir razliku prostornih vektora Vref na jednoj strani i V1 do V6 očigledno je da se ravnoteža može održati na bazi prosječnih vrednosti utoliko bolje ukoliko je Fs veće a dužina vremenskog intervala Ts manja. Sada pišemo tzv. jednačinu Volt-sec ravnoteže:
4. Upravljanje invertorom Projekcijom ove jednačine na “d” i “q” osu dobijamo sistem od dvije jednačine sa dvije nepoznate čijim rješavanjem dobijamo vremena T1 i T2 Razlika izmeđju vremenskog intervala Ts i zbira vremna (T1+T2) je Prethodno izračunata vremena ne smiju se prekoračiti ali se mogu dijeliti po potrebi unutar proračunatih granica. Naročito je pogodno kada se vrijeme primjene nul-vektora T0 primijeni na pogodan način tako da se izvrši jednostavan prelaz iz jednog u drugi vremenski interval unutar Ts. Modelovanje jednačina (10) i (11) u Matlabu-Simulinku dato je na sl 7 , dok je raspodjela proračunatih vremena po fazama data na sl 8. Na sl 9 prikazano je formiranje upravljačkih impulsa za faze A, B, C , a na sl 9°(treba a) kao primjer je data preraspodjela vremena unutar jedne od faza, tako da se promjenom parametra k1 može uticati na preraspodjelu vremena T0 što se jasno vidi sa sl 13.
Sl 10 Primjena prostornog vektora kod PWM 4. Upravljanje invertorom Na sl 10 prikazani su svi opisani elementi modela povezani u cjelinu.
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM
Raspodjela T0 Tn i T(n+1) po fazama Ta Tb i Tc(da li parametar k1 utiče na ukupno vrijeme nultog vektora T0 • S obzirom da se rdi o prosječnim vremenima primjene aktivnih i nultih vektora dozvoljena je proizvoljna preraspodjela vremena, sve dok se održavaju ukupne vrednosti vremena Tn Tn+1 i Ts. Isto važi i za T0=Ts-Tn-T(n+1) pa ga dijelimo pomoću koeficijenta k1 na dva dijela. Uloga k1 je da nam obezbijedi laku preraspodjelu vremena T0 . Sada odredjujemo vremena po fazama • Ta za fazu “a”: • Sektor 1 i 6: k1*T0 + Tn +T(n+1) (preostali dio do Ts je (1-k1)*T0 tako da je ukupno vrijeme primjene nultog vektora T0 • Sektor 2 i 5 : k1*T0+Tn • Sektor 3 i 4: k1*T0 • Za faze “b” i “c” sve se ponavlja fazno pomjereno za po 2*pi/3 za svaku fazu
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM(objasnjenje sl 13)
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM(objasnjenje sl 13)
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM(objasnjenje sl 13)
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM(objasnjenje sl 13)
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM(objasnjenje sl 13)
Crteži koji ilustruju rad modela Raspodjela vremena kod upravljanja SVPWM
function fourierdec_BB_BB_ripple(vrijeme,br_harmonika,funkcije) % vektor vremena vrijeme; br_harmonika koji se analiziraju; funkcije više % nizova funkcija koje analiziramo %fourierdec_BB.m ==> Fourier series decomposition of periodic functions of identical periods % specify the column vector t and array f representing the signals over one complete period % specify the number of harmonics to be calculated by h clc,close all disp(date) disp('fundamental frequency (Hz)') vrijeme; br_harmonika; funkcije; t=vrijeme; % vremenski interval u kome se posmatraju funkcije h=br_harmonika; % broj harmonika koje posmatramo f=funkcije; % matrica sa nizovima funkcija koje posmatramo t = t - t(1); % shift time array such that it starts with 0 L=length(t); T=t(L); fo=round(1/T); disp(fo) nu=0; %%% for w=1:size(f,2); %BB ovdje se stavlja 2 kada se f pravi iz dva %BB niza tj dvije se veli?ine analiziraju nu=nu+1; disp([' Function No. ' num2str(nu)]); disp('_________________________________') disp(' order of | amplitude | phase') disp(' harmonic | | [deg]') disp('____________|___________|________') g=f(:,w); %%% Complex Fourier coefficients ck co=1/T*trapz(t,g)+eps; fprintf('%8.0f%13.4f\n',0,co) C=[]; rms2 = co^2; I_U_ripple=0 for k=1:h q=g.*exp(-j*2*pi/T*t*k); ck= 2/T*abs(trapz(t,q)); pk=angle(trapz(t,q))*180/pi; C=[C ck]; fprintf('%8.0f%13.4f%11.2f\n',k,ck,pk) rms2 = rms2+ck^2/2; if k>1 I_U_ripple= I_U_ripple+ck^2/2; end end % RMS and THD rms = sqrt(rms2); THD = sqrt(rms2-C(1)^2/2)/(C(1)/sqrt(2)); mean = co; I_U_ripple=sqrt(I_U_ripple); disp(['RMS: ' num2str(rms)]); disp(['THD: ' num2str(THD)]); disp(['Mean: ' num2str(mean)]); disp(['I_U_ripple: ' num2str(I_U_ripple)]); disp('================================') %%% Plots order=((1:h+1)-1)'; mag=[co C]'; figure('Position',[225 70 760 555],'Name','Harmonicka analiza'); subplot(2,1,1),plot([0 0],[0 g(1)],'r',t,g,'r',[T T],[g(L) 0],'r',[T 0],[0 0],'k','linewidth',2) xlabel('TIME [s]') ;ylabel('SIGNAL'); title(['Periodicni signal (RMS=' num2str(rms) ' THD=' num2str(THD) ')']),grid subplot(2,1,2),stem(order,mag,'-ob') xlabel('Red harmonika'); ylabel('Amplituda'); title('Harmonicki clanovi'),grid end 5. Program za analizu podatakaSadržaj harmonika u ispitivanoj periodičnoj formi
5. Program za analizu podatakaSadržaj harmonika u ispitivanoj periodičnoj formi
. Program za analizu podatakaSadržaj harmonika u ispitivanoj periodičnoj formi
5. Program za analizu podatakaSadržaj harmonika u ispitivanoj periodičnoj formi
5. Program za analizu podatakaSadržaj harmonika u ispitivanoj periodičnoj formiMedjufazni napon na izlazu filtera
Dalje mogućnosti modelovanja upravljanja - U raduSV_PWM_4_02_rad_2_B4_1.mdl date su mogućnosti za drugačiju raspodjelu vremena “pauze” u radu -Provjera uticaja promjene načina rada na sadržaj harmonika
Dalje mogućnosti modelovanja -Prelazak na modelovanje u stacionarnom i sinhrono rotirajućem referentnom sistemu