Download

1 / 23
230 likes | 427 Views
PENGENDALIAN SUDUT PADA PERGERAKAN TELESKOP REFRAKTOR MENGGUNAKAN PERSONAL COMPUTER. Melvini Eka Mustika 1.02.07.071. JURUSAN TEKNIK KOMPUTER FAKULTAS TEKNIK DAN ILMU KOMPUTER UNIVERSITAS KOMPUTER INDONESIA 2012. Latar Belakang Masalah.

E N D
PENGENDALIAN SUDUT PADA PERGERAKAN TELESKOP REFRAKTORMENGGUNAKAN PERSONAL COMPUTER Melvini Eka Mustika 1.02.07.071 JURUSAN TEKNIK KOMPUTER FAKULTAS TEKNIK DAN ILMU KOMPUTER UNIVERSITAS KOMPUTER INDONESIA 2012
Latar Belakang Masalah • Pengendalian yang dilakukansecaraotomatismemberikanbanyakkeuntungan • Memanfaatkan PC sebagai media pengendali otomatisberbantuan manusia
Maksud dan Tujuan • Membuat suatu perangkat yang dapat melakukan otomatisasi pada pergerakkan teleskop • Membuat kendali teleskop dengan komputer sebagai media pengendalinya
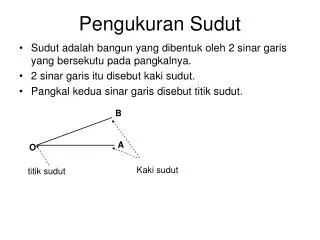
Batasan Masalah • Teleskop jenis refraktor dengan diameterobjektif : 60 mm, maksimal massa teleskop 1kg, maksimal panjang teleskop 70 cm • Pergerakan teleskop dapat bergerak ke empat arah, atas , kanan , bawah dan kiri • Uji pergerakan sudut teleskop menggunakan laser pointer • Tidak mendeteksi koordinat benda langit
Dasar Teori • Teleskop • Teleskop refraktor • Teleskop reflektor Cara kerja teleskop refraktor Teleskop bintang
Dasar Teori (2) 2. Mikrokontroler BS2P40 Bentuk fisik Spesifikasi • Bahasa pemrograman sederhana • Kecepatan tinggi dengan frekuensi clock 20MHz • Jumlah pin 40 buah, jalur I / O sebanyak 32 • Kapasitas memori EEPROM 8 x 2 Kbyte • Jalur komunikasi serial UART RS – 232 • Vinput 9 – 12 VDC, V output 5 VDC. Konfigurasi pin
Dasar Teori (3) 3. Motor Servo • Motor DC yang mempunyai kualitas tinggi dengan sistem kontrol di dalamnya yang dapat mengendalikan posisi, membelokkan dan menjaga suatu posisi berdasar nilai pulsa HS5645 HS5245 Sinyal kontrol motor servo Memrogram motor servo : PULSOUT Pin, Duration
Dasar Teori (4) 4. Catu Daya a. Transformator • Transformatormerupakansuatuperalatanlistrikelektromagnetikstatis yang berfungsiuntukmemindahkandanmengubahdayalistrikdarisuaturangkaianlistrikkerangkaianlistriklainnya. Transformator b. Regulator • Regulator teganganmenyediakanoutputteganganDC yang konstandansecaraterus - menerusmenahanteganganoutputpadanilai yang diinginkan.
Perancangan Sistem Diagram blok perancangan sistem • PC (Personal Computer) terpasang aplikasi Visual Basic 6.0. • RS-232 berfungsi sebagai pengubah tegangan. • Mikrokontroler Basic Stamp BS2P40 berfungsi sebagai pengolah data. • Motor servo jenis HS5245MG untuk menggerakan teleskop arah sumbu-X. • Motor servo jenis HS5645MG untuk menggerakan teleskop arah sumbu-Y. • Teleskop sebagai penangkap objek.
Perancangan Mekanik b. Pemasangan motor servo a. Dudukan teleskop HS5245MG HS5645MG c. Peralatan penguji Laser pointer Layar sudut
Perancangan Mikrokontroler dan Catu Daya b. Catu Daya a. Mikrokontroler Rangkaian regulator Sistem minimum mikrokontroler Regulator
Arah Pergerakan Teleskop a. Arah gerak sumbu-X b. Arah gerak sumbu-Y
Flowchart Mikrokontroler Program (click)
Flowchart (2) 2. Antarmuka Program (click)
Pengujian Motor Servo Motor Servo HS5245MG 2. Motor Servo HS5645MG
Pengujian Pergerakan Teleskop Pergerakan ke Kanan
Pengujian Pergerakan Teleskop (2) 2. Pergerakan ke Kiri
Pengujian Pergerakan Teleskop (3) 3. Pergerakan ke Atas Jarak dari laser pointer = 70cm
Kesimpulan • Telah berhasil dibuat perangkat pengendalian pergerakan teleskop dengan dua derajat kebebasan yang dapat digerakan ke arah atas , bawah , kanan dan kiri . • Berdasarkan tabel IV.3 dan tabel IV.4, rentang pulsa untuk menggerakan setiap motor servo tidak selalu sama, yaitu 950 – 2790 dan 950 – 1950. • Sudut putar maksimum teleskop ke arah atas yaitu 500 dan ke arah kanan dan kiri masing – masing 800. • Berdasarkan tabel IV.6, IV.7 dan IV.8 dapat disimpulkan bahwa semakin besar sudut input semakin kecil error yang dihasilkan, yaitu rentang error 295% hingga 6%, 270% hingga 3.1% dan 70% hingga 26%. • Teleskop dapat digerakan ke arah atas, bawah, kanan dan kiri dengan tingkat penyimpangan sudut sebesar 3.720 dan tingkat error rata-rata sebesar 48.21%. Hal ini dikarenakan faktor mekanik yang kurang baik dan motor servo yang tidak menggunakan potensiometer bawaannya.
Saran • Dibuat mekanik yang lebih baik dengan mempertimbangkan penempatan motor servo agar pergerakan teleskop dapat stabil. • Perlu penambahan sensor Accelerometer sebagai pengukur akurasi pergerakan teleskop. • Dapat ditambahkan web cam dan sensor untuk deteksi koordinat benda langit agar menjadi perangkat teleskop digital yang lebih canggih.