Download
1 / 19
190 likes | 419 Views
MANUAL DE USUARIO. MAQUINA EXPERIMENTAL MULTIEJES. CONTENIDO. Ambiente del lenguaje de programación. Establecer Comunicación Abrir Programa MX2000 Encendido Código Compilar y Descargar Puerto de comunicación Preparación en la ventana Terminal Limites de carrera y cero de pieza

E N D
MANUAL DE USUARIO MAQUINA EXPERIMENTAL MULTIEJES CONTENIDO
Ambiente del lenguaje de programación • Establecer Comunicación • Abrir Programa MX2000 • Encendido • Código • Compilar y Descargar • Puerto de comunicación • Preparación en la ventana Terminal • Limites de carrera y cero de pieza • Ejecutar el programa • Precauciones
Serial • RS 485 Establecer Comunicación MENU
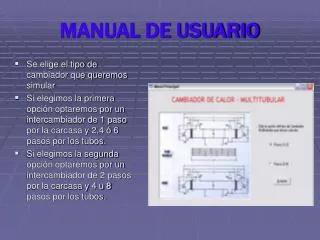
Abrir Programa MX2000 • Abrir proyecto: Si ya se ha configurado previamente el controlador • Crear proyecto: Si se desea hacer una configuración personalizada del controlador Sugerencia Cargar la configuración: Alabe.prj MENU
Encendido • NOTA Se debe tener precaución cuando se enciende el equipo, ya que, puede comenzar ejecutando el programa cargado la ultima vez que se utilizo, si es así, es necesario estar alerta para interrumpir la operación. MENU
Código Tratamiento del código generado por postprocesador UG – Máquina. Del código generado por el postprocesador, se utiliza solo la programación de trayectorias, es decir, la parte del código que esta después del movimiento continuo inicial del husillo (jogstart) y antes de la ultima parada del husillo (jogstop). Luego, este se pega en el programador de tareas del MX2000, en medio del las instrucciones jogstart y jogstop del proyecto que tiene la configuración ya preestablecida. • Generación manual de código • Generación a partir de alguna interfaz software-máquina
'POSTPROCESADOR MX2000 'LUIS CARLOS SANDOVAL R 232226 'DANIEL ANDRES RAMIREZ R 232536 DRVREADY=15 WNDGS=1,,,,,1 SPEED=30,30,30,30,30 VELOCITY=1 ABSPOS=0,0,0,0,0 POSMODE=1,1,1,1,1 MOVE(2)=10 WAITDONE(2) '(Operación=SEMIACABADO ; HERRAMENTA=MILLMEDIA) '(T=3;D=12.70;R=6.35;CC=50.00;CM=100.00) SPEED(6)=1200 JOGSTART(6)=-1 MOVE= 0.0 , .127 , 49.971 , -1.694 , 0.0 WAITDONE=1,1,1,1,1 MOVE= , -30.955 , , , WAITDONE=,1,,, FEEDRATE=20. LINE= , -33.955 . . . . . . WAITDONE= , , 1 , 1 LINE= , , -49.742 , -5.072 WAITDONE= , , 1 , 1 LINE= , , -49.971 , -1.694 WAITDONE= , , 1 , 1 LINE= , , , 1.694 WAITDONE= , , , 1 MOVE= , -30.955 , , , WAITDONE=,1,,, MOVE= , .127 , , , WAITDONE=,1,,, JOGSTOP(6)=0 MOVE(2)=20 WAITDONE(2) MOVE=0,,0,0,0 WAITDONE=1,,1,1,1 MOVE(2)=0 WAITDONE(2) END Ejemplo Postprocesador UG – Máquina Copiar Copiar
Ejemplo Postprocesador UG – Máquina PEGAR EL CODIGO DE LA TRAYECTORIA AQUÍ !! MENU
Compilar y Descargar • Compilar el proyecto • Descargar el proyecto MENU
Verificar puerto de comunicación En Com port 3 esta configurado el puerto: RS485 ó Com port 1, para comunicación serial MENU
Preparación en la ventana Terminal • <1Dirección de la máquina, si es necesario. • dir Mirar que programas están almacenados en memoria • Erase Borra lo que hay en memoria • DRVREADYHabilita los ejes de la máquina que se especifiquen. • WNDGSEnergiza los servos MENU
Limites de carrera y cero de pieza • La capacidadvolumétrica del la máquina se deben evaluar antes de considerar mecanizar en este dispositivo. Esto se hace conociendo las unidades de distancia entre los limites de carrera de la mesa posicionadora XY y el dispositivo vertical. • Después, se ubica el cero de pieza manualmente antes de correr el programa, de tal forma, que se aproveche el espacio entre limites de carrera, configurando la posición absoluta de forma adecuada (cero de pieza), esto, utilizando la instrucción ABSPOS.
170 mm 224 mm 183 mm
Limites de carrera y cero de pieza NOTA • El cero de pieza siempre debe ubicarse fuera del blanco, ya que, el método para definirlo es físico, es decir, la posición que tiene la punta de la herramienta antes de ejecutar el programa, es el cero de pieza, esto se hace mediante el comando “abspos” y “posmode” : • ABSPOS=0,0,0,0,0 • POSMODE=1,1,1,1,1 MENU
Ejecutar el programa • En la ventana Terminal, con la instrucción “RUN” se ejecuta el programa después de compilar y descargar. PRECAUCION En caso de cualquier problema, utilizar la instrucción “STOP PROGRAM” MENU
Precauciones • Cuidado con las conexiones de la máquina y el PC. • Cuando se carga el programa, no es conveniente guardar un código fuente, esto de desactiva en el menú: system/save source code. • No cargar programas que ocupen toda la memoria del controlador, lo satura. • Al finalizar la sesión borrar el programa de la memoria del controlador. INICIO