Download
1 / 13
130 likes | 262 Views
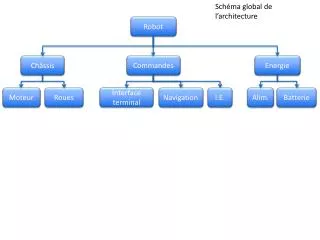
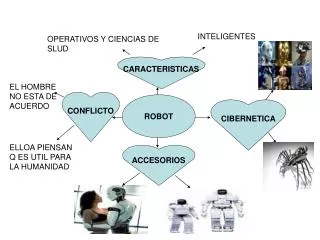
PROGRAMOVÁNÍ ROBOTŮ. Ing. Vladislav Bezouška, Ph.D. PROGRAMOVÁNÍ ROBOTŮ. Přímé (on-line) Nepřímé (off-line). Projetím bodů dráhy (teach-in) . Vedení rmene (Playback) . Textové programování (např. BAPS) . CAD/CAM) . Přímé Nepřímé.

E N D
PROGRAMOVÁNÍ ROBOTŮ Ing. Vladislav Bezouška, Ph.D.
PROGRAMOVÁNÍ ROBOTŮ Přímé (on-line) Nepřímé (off-line) Projetím bodů dráhy (teach-in) Vedení rmene (Playback) Textové programování (např. BAPS) CAD/CAM) Přímé Nepřímé OFF-LINE - výpočty dráhy jsou prováděny bez pohybu robotu ON-LINE - výpočty dráhy jsou prováděny při pohybu robotu
TEACH-IN (nepřímé) - rameno je ručně navedeno do pracovních bodů a pozice uložena do paměti • Odpadá transformace souřadnic Př.: Robot má přemísťovat objekt ze zásobníku M2 (přednostně) a M1 přemisťovat ho do místa W. [Obrázek převzat z literatury č.5]
Vývojový diagram + program (ASEA) [Obrázek převzat z literatury č.4] Stanov. rychlosti Zadani souř. sys. Volba ToolCentr.P Nul. posun Podmín. skok Pohyb S k A, 100%v,nul.zona r=10mm Poh A k M1 Sevri čekání M1 k A
TEACH-IN (přímé) - rameno je ručně navedeno do pracovních bodů. Dráhu tvoří hustá síť bodů. PLAYBACK - rameno je ručně vedeno a jeho pozice je průběžně ukládána do paměti [Obrázky převzaty z literatury č.2]
Programování ve vyšším jazyce - programování pomocí instrukcí (BAPS Bosch, SRCL Siemens, VAL Unimation) [Obrázky převzaty z literatury č.1]
Př.: Sváření: 3,4 – exter. prog.; 5 – def. proměnné; 12 – do výchozí pozice; 13,16 - sváření DATA [Obrázky převzaty z literatury č.1]
Programování pomocí makroinstrukcí [Obrázky převzaty z literatury č.1] Makra jsou spouštěna voláním jména funkce OBLOUK ZAP – přiblíží elektrodu OBLOUK VYP – přerušení oblouku
CAD/CAM - Programování z výrobního výkresu - Virtuální simulace [Obrázky převzaty z literatury č.1]
Spark Visual Motion • Libovolný počet os • Xdrive technology: virtuální programování • Simulace výroby
Funkce Spark Visual Motion 1) Tvorba 3D modelu: geometrická data jsou načtena z CAD systému pomocí DXF nebo STL datových souborů 2) Vizuální tvorba trajektorie tj. dráhy a rychlostí 3) Generování kódů programu
Real Time Simulation Řízení stroje v reálném čase MotionCL (Motion Control Library) Umožje provedení řídících výpočtů a dalších řídících operací
Literatura : [1] Schmid D. a kol.: Řízení a regulace pro strojírenství a mechatroniku. Europa Sobotáles.Praha, 2005. [2] Talácko J., Matička R.: Konstrukce průmyslových robotů a manipulátorů. ČVUT. 1995. [3] Chvála B., Nedbal J., Dunay G.: Automatizace. SNTL/ALFA. Praha , 1985. [4] Šolc F., Žalud L.: Robotika. VUT. Brno, 2002.